Отправить свою хорошую работу в базу знаний просто. Используйте форму, расположенную ниже
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Размещено на http://www.allbest.ru
Расчет параметров настройки регулятора
Расчёт настроек ПИ-регулятора в контуре регулирования температуры
Задача настройки регулятора состоит в том, чтобы, располагая динамическими характеристиками объекта и регулятора, так выбрать и установить настроечные параметры регулятора, чтобы обеспечить оптимальный переходный процесс в автоматической системе.
Под оптимальными настройками регулятора будем понимать настройки, обеспечивающие для заданного объекта процесс регулирования, удовлетворяющий выбранным критериям качества.
Для коррекции динамических свойств системы применяются: пропорциональный (П), интегрирующий (И), пропорционально-интегрирующий (ПИ), пропорционально-дифференциирующий (ПД) и пропорционально-интегрально-дифференциирующий (ПИД) регуляторы.
Для регулирования температуры водородосодержащего газа на выходе из газосепаратора С-1(поз. TIR-3105) с помощью одноконтурной системы управления будем использовать ПИ-регулятор.
Статистическая ошибка ПИ-регулятора практически равна нулю, т.е повышается точность регулирования. Также ПИ-регуляторы обладают достаточным быстродействием и дают возможность вывода параметра на заданный уровень.
У ПИ-регуляторов воздействие входной величины на выход тем больше, чем больше коэффициент пропорциональности и меньше постоянная интегрирования Ти.
Уравнение ПИ-регулятора:
Передаточная функция:
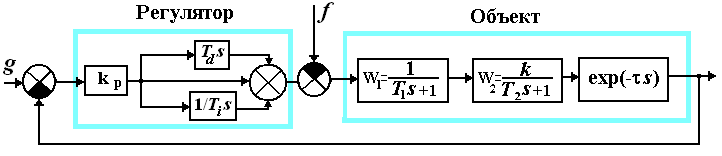
Схема одноконтурной системы управления представлена на рисунке 3.2.
Схема одноконтурной системы управления
Время запаздывания для данного объекта равно 20 сек.
где - передаточная функция объекта управления
где - передаточная функция ПИ- регулятора
Тогда передаточная функция разомкнутой системы будет иметь вид:
Передаточная функция замкнутой системы имеет вид:
Характеристическое уравнение системы:
Для нахождения математического описания объекта управления по заданной кривой разгона воспользуемся программой RKPF.
При запуске программы указываем входные значения:
Число измерений
Временной интервал
Входное значение в начальный момент времени
Входное значение при t0 равном бесконечности
Входные параметры
Из режимных листов берем данные температуры за смену(холодный эксперимент) и строим кривую разгона.
Таблица данных для кривой разгона
Кривая разгона
Передаточная функция
В итоге получаем передаточную функцию следующего вида:
настройка регулятор передаточная
Для расчёта ПИ-регулятора в одноконтурной системе воспользуемся программой Reg2.
Расчёт ПИ-регулятора в одноконтурной системе
Коэффициенты ПИ-регулятора:
Передаточная функция ПИ-регулятора
Для наглядности полученных результатов расчёта одноконтурной системы, а также для определения показателей качества переходного процесса, построим кривую переходного процесса.
Временной график
По полученному переходному процессу графически определим характеристики переходного процесса:
1) Время переходного процесса tp определяется как промежуток времени, через который величина сигнала войдет в зону допустимой ошибки tp=1,6мин
2)Перерегулирование?ymax=12%
3)Колебательность -число колебаний за время переходного процесса =1,5
4) Степень затухания
Размещено на Allbest.ru
Подобные документы
Идентификация объекта управления, воздействие на него тестового сигнала в виде ступенчатого изменения, получение разгонной характеристики. Расчет и оптимизация настроек непрерывного регулятора. Анализ замкнутой системы, состоящей из объекта и регулятора.
курсовая работа , добавлен 24.04.2010
Расчет и моделирование системы автоматического управления. Дискретная передаточная функция объекта с учетом заданных параметров. Вычисление основных параметров цифрового регулятора. Уравнение разницы регулятора. Результаты моделирования системы.
лабораторная работа , добавлен 18.06.2015
Расчет параметров настройки ПИ-регулятора для объекта второго порядка. Аналитический расчет и реализация программы в среде MatLab, которая определяет параметры регулятора и переходного процесса. Критерии качества переходного процесса замкнутой системы.
лабораторная работа , добавлен 29.09.2016
Функциональная и структурная схема канала регулирования. Синтез регулятора тока и скорости. Статический и динамический расчет системы и переходных процессов. Качество настройки регулятора. Принципиальная электрическая схема якорного канала регулирования.
курсовая работа , добавлен 28.09.2012
Параметрический синтез САР простейшей структуры на основе инженерных методик по моделям объекта 1-го порядка (без использования процедуры оптимизации). Расчет параметров регулятора по инженерным методикам для определения начальных настроек регулятора.
лабораторная работа , добавлен 15.05.2015
Расчет областей устойчивости пропорционально-интегрально-дифференциального регулятора. Выбор оптимальных параметров регулирования. Построение передаточной функции, области устойчивости. Подбор коэффициентов для определения наибольшей устойчивости системы.
контрольная работа , добавлен 11.06.2014
Выбор регулятора для объекта управления с заданной передаточной функцией. Анализ объекта управления и системы автоматического регулирования. Оценка переходной и импульсной функций объекта управления. Принципиальные схемы регулятора и устройства сравнения.
курсовая работа , добавлен 03.09.2012
Знакомство с этапами расчета настроек типовых регуляторов в одноконтурной автоматической системе реагирования. Особенности выбора типа промышленного регулятора. Способы построения области устойчивости в плоскости настроечных параметров регулятора.
дипломная работа , добавлен 17.06.2013
Статическая и динамическая характеристика объекта регулирования. Расширенные частотные характеристики. Выбор и расчет параметров настройки регулятора. Передаточные функции системы. Методы проверки устойчивости системы, построение переходных процессов.
курсовая работа , добавлен 25.08.2010
Разгонная характеристика объекта регулирования и определение параметров, характеризующие инерционные свойства объекта. Расчет параметров настройки регуляторов по амплитудно-фазовой характеристике объекта регулирования. Расчет показателей качества САР.
Регулятор, включенный в АСР, может иметь несколько настроек, каждая из которых может изменяться в достаточно широких пределах. При этом при определенных значениях настроек система будет управлять объектом в соответствии с технологическими требованиями, при других может привести к неустойчивому состоянию.
Поэтому стоит задача, во-первых, определить настройки, соответствующие устойчивой системе, и, во-вторых, выбрать из них оптимальные.
Оптимальными настройками регулятора называются настройки, которые соответствуют минимуму (или максимуму) какого-либо показателя качества. Требования к показателям качества устанавливаются непосредственно, исходя из технологических. Чаще всего накладываются требования на время регулирования (минимум) и степень затухания (Y ³ Y зад).
Однако, изменяя настройки таким образом, чтобы увеличить степень затухания, мы можем прийти к слишком большому времени регулирования, что нецелесообразно. И наоборот, стремясь уменьшить время регулирования, мы получаем более колебательные процессы с большим значением Y.
Зависимость Y от t p в общем случае имеет вид, изображенный на графике (см. рисунок 1.61).
Поэтому для определения оптимальных настроек разработан ряд математических методов, среди которых можно выделить:
Метод сканирования плоскости настроек,
Формульный метод,
Метод D-разбиения.
Метод сканирования заключается в разбиении области допустимых настроек выбранного регулятора с равным шагом и определении показателей качества для каждого набора настроек в узлах получившейся сетки. После просмотра всех узлов выбираются наборы настроек, соответствующие наилучшим показателям качества. Настройки могут быть уточнены далее также путем сканирования окрестности выбранного узла с более мелким шагом.
Формульный метод определения настроек регуляторов используется для быстрой и приближенной оценки значений настроек регуляторов.
Если объект управления представляет собой инерционное звено с запаздыванием, т.е. описывается передаточной функцией
![]() ,
,
где K – коэффициент усиления, Т - постоянная времени, t - запаздывание (см. п. 2.6.5), то настройки П-, И-, ПИ- и ПИД-регуляторов могут быть определены по приведенным в таблице 1.5 формулам в зависимости от того, какой вид переходного процесса требуется получить. Во второй колонке таблицы приведены формулы для апериодического процесса без перерегулирования, в третьей – с перерегулированием 20 %, в четвертой – для процесса с максимальным быстродействием (процесс может быть сильно колебательным).
Метод D-разбиения заключается в определении области настроек в пространстве допустимых значений настроек выбранного регулятора, соответствующих области устойчивости или заданному показателю качества. Кривая D-разбиения представляет собой границу устойчивости в пространстве настроек и поэтому строится с использованием какого-либо критерия устойчивости.
Построение кривой D-разбиения по методу Гурвица сводится к решению системы неравенств вида D i ³ 0, определяющих условие устойчивости.
Пример. Определение области устойчивости АСР по методу Гурвица.
Структура АСР представлена на рисунке 1.30 (см. п. 2.6.4). Параметры K 2 = 1, K 4 = 2, K 5 = 0,5. Параметры K 0 и K 1 являются переменными. Требуется записать условие устойчивости относительно K 0 и K 1 .
Для записи условия устойчивости в данном примере наиболее удобно воспользоваться критерием Гурвица.
Характеристическое уравнение замкнутой системы имеет вид (пример определения характеристического уравнения см. в п. 2.6.4):
D(s) = 2 . s 3 + 4 . s 2 + (K 1 + 1) . s + K 0 .
Метод незатухающих колебаний (метод Циглера-Никольса). Значение параметров настройки, достаточно близкие к оптимальным, могут быть получены в результате исследования замкнутой системы П-регулятором. Для этого время изодрома Т и устанавливают равным бесконечности (либо мах возможному значению), время предварения Т п – равным нулю (либо минимально возможному значению) и определяют реакцию системы на ступенчатое изменение заданного значения управляемого параметра при различных значениях коэффициента усиления регулятора.
Значение коэффициента усиления, при котором в системе возникают незатухающие колебания с постоянно амплитудой – это и есть мах коэффициент усиления. Период колебания при мах коэффициенте усиления называется предельным (или критическим) периодом колебания и обозначается Т кр. Настройку промышленного регулятора выбирают так, чтобы обеспечить запас устойчивости по амплитуде или по фазе.
Метод затухающих колебаний. Если не допускаются незатухающих колебания. Регулятор настраивают на пропорциональный закон регулирования, для чего время изодрома устанавливают равным бесконечности или мах возможной величине, время предварения выводят на значение =0 или на мин возможное значение. Затем определяют реакцию системы на ступенчатое изменение заданного значения регулируемого параметра при различных значениях коэффициента усиления регулятора, начиная с его малых значений. Увеличивают до тех пор, пока декремент затухания в переходном процессе замкнутой системы не окажется равным 0,25. Рекомендуемые значения времени изодрома и времени предварения определяются по полученному при этом периоду затухающих колебания Т, причем последний всегда больше, чем критический период колебаний. Для ПИД-регулятора: Т и =Т/1,5; Т п =Т/6. После установки на ПИД-регуляторе рекомендованных выше значений Т следует уточнить настройку коэффициента усиления таким образом, чтобы декремент затухания по-прежнему равнялся 0,25.
Настройка ПИД регуляторов . При применении ПИД- регуляторов для каждого конкретного объекта необходимо настраивать от одного до трех коэффициентов. Возможны САР с автоматизированной настройкой. Для типовых регуляторов известны простейшие аналитические и табличные методы настройки (например две методики Цидлера).
Настройка по реакции на входной скачок Алгоритм настройки:
На вход САР подается новое задание (уставка) – нагреватель включается на максимальную мощность, и по переходному процессу X(t) определяются t0, R, tи (см. рис.4):
для П-регулятора К= 1/R·t0;
для ПД-регулятора К= 1/R·t0, Td=0.25·t0;
для ПИ-регулятора К= 0.8/R·t0, Ti= 3·t0
для ПИД-регулятора К= 1.2/R·t0, Ti= 2·t0, Td=0.4·t0.
Не обязательно выводить объект на максимально возможную величину Х. Однако, следует иметь в виду, что слишком маленький скачок не позволяет определить R с достаточно высокой точностью.
Рис.4. Разгонная кривая для объекта с транспортным запаздыванием:
to - время транспортного запаздывания;
tи - постоянная времени (время согласования) определяется инерционностью объекта;
Xy - установившееся значение;
R - наклон разгонной кривой dX/dt (макс. скорость изменения Х)
Настройка по методу максимального коэффициента усиления . Этот способ применяется, если допустим колебательный процесс, при котором значения регулируемой величины значительно выходят за пределы задания U.
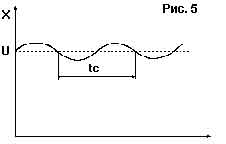
Рис.5. К настройке по методу максимального коэффициента усиления
Алгоритм настройки:
Определяется предельный коэффициент Кмах усиления при котором САР и объект переходят в колебательный режим, т.е. без интегральной и дифференциальной части (Тd=0, Тi=Ґ). Вначале К=0, затем он увеличивается до тех пор, пока САР и объект переходит в колебательный режим. САР соответствует схеме П-регулятора (см.рис.2);
Определяется период колебаний tc (см. рис.5);
Вычисляются коэффициенты настройки согласно следующим примерным соотношениям:
для П-регулятора К= 0.5·Kмах;
для ПД-регулятора К= 0.5·Кмах, Td=0.05·tc;
для ПИ-регулятора К= 0.45·Кмах, Ti= 0.8·tс;
для ПИД -регулятора К= 0.6·Кмах, Ti= 0.5·tс, Td=0.12·tc.
Настройка по процессу двухпозиционного регулирования по релейному закону
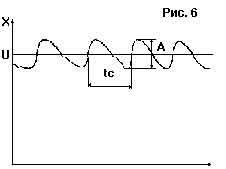
Рис.6.К настройке по процессу двухпозиционного регулирования
Эта методика удобна, если применялся Т-регулятор, который затем заменяется на ПИД- регулятор:
Система переводится в режим двухпозиционного регулирования по релейному закону (см. рис.6);
определяется амплитуда - А и период колебаний tс;
Вычисляются коэффициенты настройки согласно следующим примерным соотношениям:
для П-регулятора К = 0.45/А;
для ПД-регулятора К = 0.45/А, Td=0.05·tc;
для ПИ-регулятора К = 0.4/А, Ti= 0.8·tc;
для ПИД-регулятора К = 0.55/А, Ti= 0.5·tс, Td=0.12·tc.
Если объект не меняет структуру и свои параметры, то системы с ПИД-регуляторами обеспечивают необходимое качество регулирования при больших внешних возмущающих воздействиях и помехах, то есть близкое к 0 рассогласование Е (см. рис.7). Как правило, точно согласовать параметры регулятора и объекта сразу не удается. Если Ti меньше оптимального в два раза, процесс регулирования может перейти в колебательный режим. Если Ti существенно больше оптимального, то регулятор медленно выходит на новый режим и слабо реагирует на быстрые возмущения - G. Таким образом, как правило необходима дополнительная подстройка. На рис.7 показано влияние неоптимальных настроек ПИД-регуляторов на вид переходной функции (реакции САР и объекта на единичный скачок в задании).
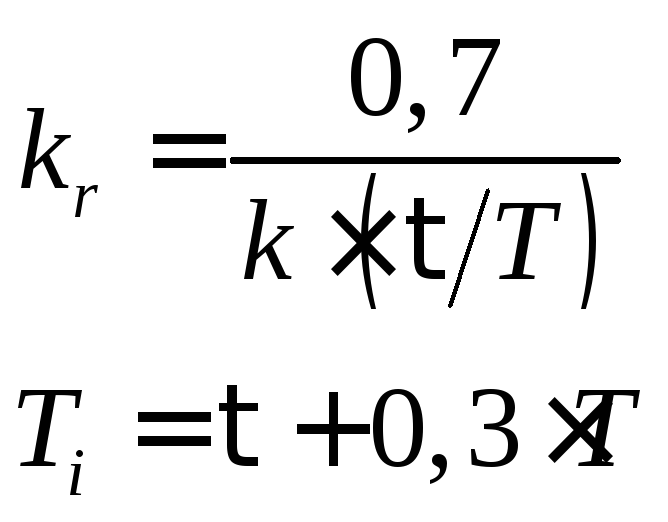
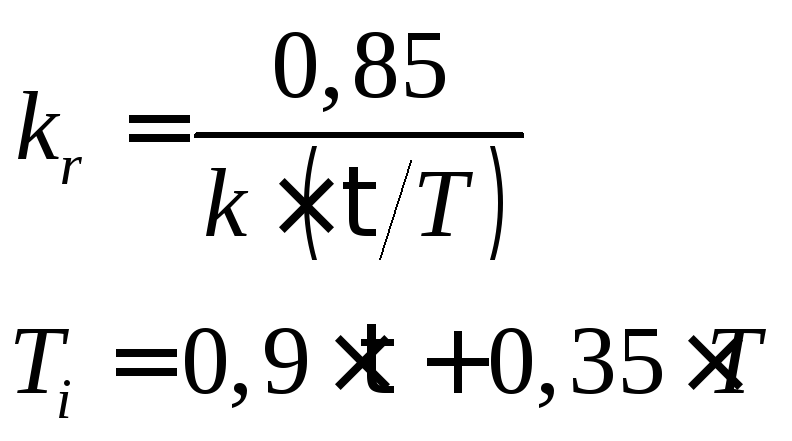
В инженерных методах расчеты настроек регулятора чаще всего производятся на основе приближенной модели объекта с передаточной функцией вида (4), т.е. на основе модели объекта, состоящей из последовательно соединенного апериодического звена первого порядка и звена транспортного запаздывания. Настроечные параметры регулятора, в зависимости от его типа и от характера требований к переходному процессу, определяются комбинациями параметров k, T и τ. В табл. 2 приведены эти соотношения для настроек ПИ- и ПИД- регуляторов при регулировании устойчивого объекта.
Конечно, эти соотношения являются приближенными, поскольку параметры регулятора связаны с отношением τ/T , вообще говоря, нелинейной зависимостью. Более точным является расчет по номограммам, учитывающим такую зависимость. Однако и в этом случае следует относиться осторожно к полученным с их помощью настройкам, поскольку под возмущением нагрузкой в этих методах понимается возмущение, идущее со стороны регулирующего органа, соответственно составлены и номограммы.
Таблица 2. – Настройки регуляторов для получения различных переходных процессов
|
регуля- тора |
Апериоди- ческий с min t p |
С 10 % забросом |
С 20 % забросом |
С min I 2 |
|
|
|
|
||
|
|
|
|
|
Инженерные методы имеют узкую область применения, ограниченную одноконтурными системами, в то время как методы расчета по частотным характеристикам объекта являются основой для построения методов расчета реально применяемых сложных систем регулирования, и, позволяя учитывать статистические характеристики случайных шумов, могут быть положены в основу построения адаптивных систем.
2.4. Экспериментальные методы расчета настроек
регулятора
Для значительного числа технологических объектов управления отсутствуют достаточно точные математические модели, описывающие их статические и динамические характеристики, а проведение экспериментов по снятию этих характеристик весьма дорого и трудоемко. В этом случае для настройки регуляторов может быть использован экспериментальный метод, который не требует знания математической модели объекта (метод Зиглера). Однако, если система смонтирована и может быть запущена в работу, а также существует возможность изменения настроек регулятор, то можно проводить экспериментальное исследование по анализу влияния изменения настроек на динамику системы. Это гарантирует получение достаточно хороших настроек, приблизительно минимизирующих квадратичный ИКК при ограничении на колебательность. Идея экспериментального метода заключается в нижеописанной процедуре.
Регулятор переводится в П-алгоритм регулирования, а далее путем последовательного увеличения k r с одновременной подачей небольшого скачкообразного изменения сигнала задания добиваются возникновения в системе незатухающих колебаний с периодом T кол, что соответствует выведению системы на границу колебательной устойчивости. При возникновении данного режима работы фиксируются значения критического коэффициента усиления регулятора и периода критических колебаний в системе. Заметим, что при появлении критических колебаний ни одна переменная системы не должна выходить на уровень ограничения. По значениям T кол и k кр рассчитываются оптимальные параметры настройки регулятора согласно соотношениям для ПИ- и ПИД-регуляторов
|
|

Разумеется, если передаточная функция объекта известна, то критический коэффициент усиления регулятора можно рассчитать аналитически, используя критерий Найквиста. Однако, при выполнении данного этапа расчета настроек полезно провести имитацию экспериментальной процедуры. Поэтому алгоритм решения задачи представляется следующим:
составить в пакете Simulink модель замкнутой линейной системы согласно структурной схемы, отвечающей сохранению в передаточной функции регулятора только пропорционального слагаемого.
постепенно увеличивая коэффициент передачи регулятора добиться незатухающих колебаний;
зафиксировать значение критического коэффициента передачи и по графику переходного процесса измерить период незатухающих колебаний;
Для того чтобы реализовать в пакете Simulink программу расчета переходного процесса следует согласно известной технологии “click-and-drag” перенести в открытый документ блоки из браузера библиотек Simulink – Linear , Math . Operations , Sorces , Sinks . Соединить входы и выходы блоков согласно общей структурной схеме замкнутой системы, представленной на рис. 10. В разделе меню Simulation\Simulation parameters установить величину времени, отвечающее окончанию переходного процесса – Stop time, равной – 200-300 c. Величину шага интегрирования дифференциальных уравнений методом Дорманда-Принса четвертого порядка (ODE 45) – “max. step size” установить равной 0,05 – 0,1.
|
Рис. 10. Структурная схема замкнутой САР |
 К чему снится капуста в кочанах
К чему снится капуста в кочанах Произношение шипящих звуков,,, в норме Какая характеристика относится к звуку ж
Произношение шипящих звуков,,, в норме Какая характеристика относится к звуку ж День памяти жертв геноцида армян
День памяти жертв геноцида армян