Motor gleichstrom (DPT)
Gerät:
1. Stator (Induktor).
2. Der Rotor (Anker).
Der Stator umfasst: ein Gehäuse, einen Magnetkreis in Form von Polen, auf dem sich die Feldwicklung befindet.
Induktor wird der Teil der Maschine genannt, der ein Magnetfeld erzeugen soll.
Der Rotor umfasst: eine Welle, einen Magnetkreis, in dessen Nuten sich eine Wicklung befindet, und einen Kollektor mit Bürsten.
Legende:
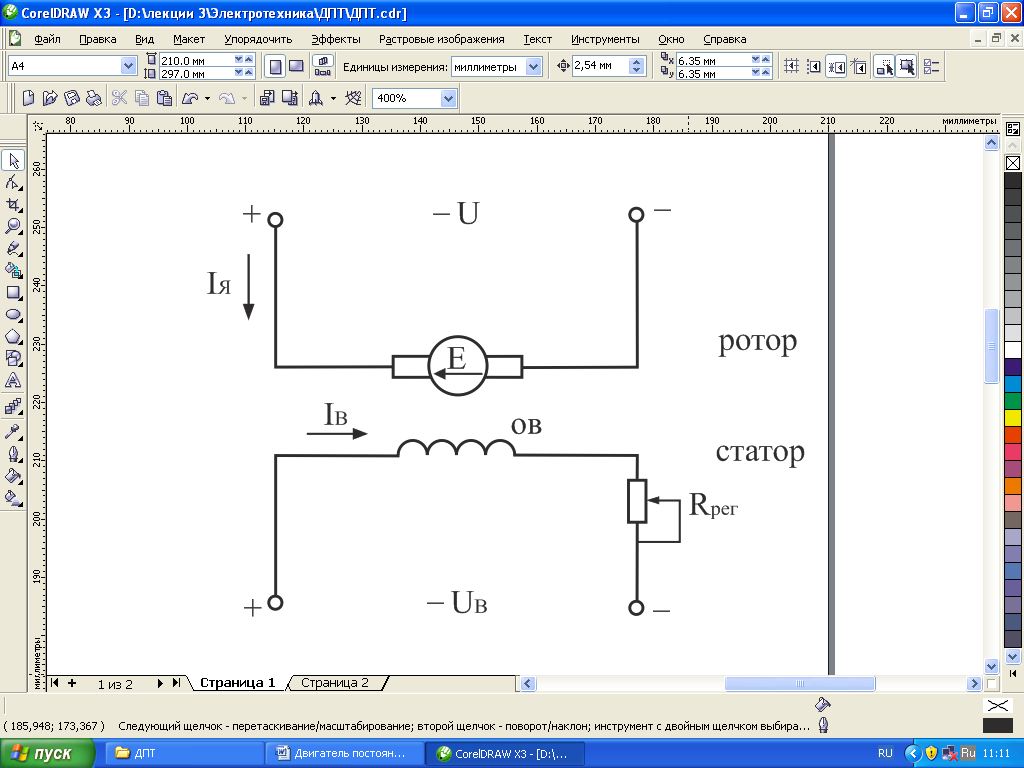
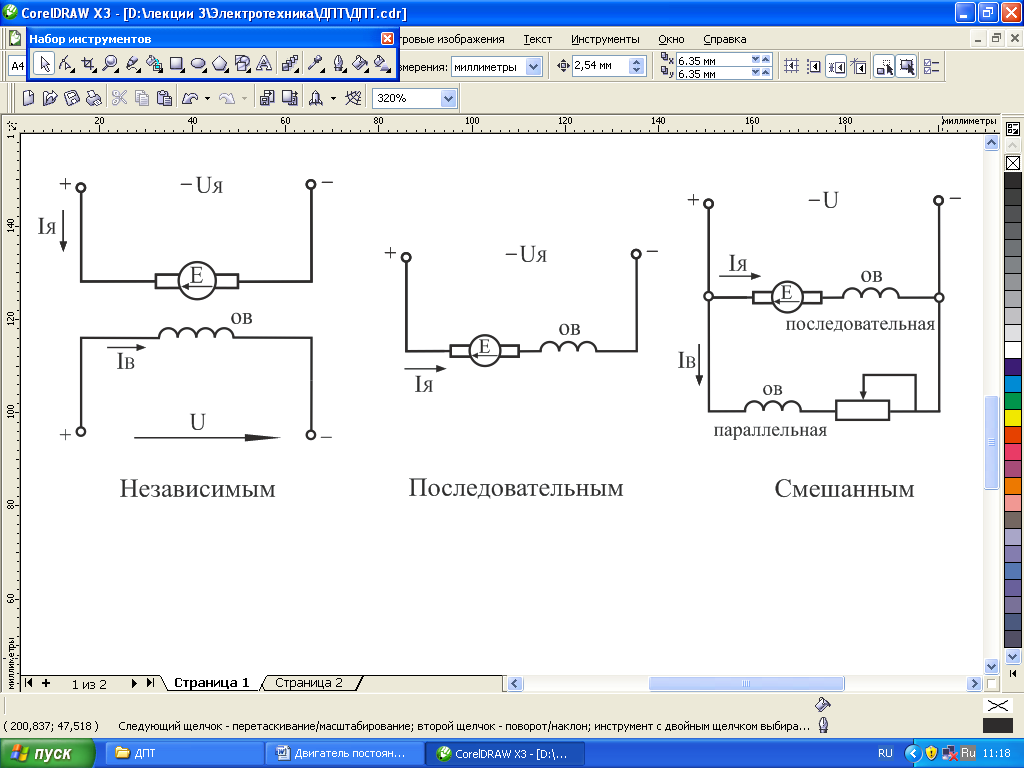
DPT-Schemata mit verschiedenen Arten der Anregung:
Arbeitsprinzip:
U B → I B → Ф;
wo I In ist der Erregerstrom; I I - Ankerstrom.
Die Wechselwirkung des Ankerstroms mit dem Magnetfluss Φ des Stators entsteht drehmoment:
wobei C M der Auslegungskoeffizient ist.
Unter der Wirkung von M beginnt sich der Rotor zu drehen, während er die Kraftlinien kreuzt magnetfeld, wodurch die EMF darin genannt wird, die als EMF der Rotation bezeichnet wird:
Grundgleichungen von DPT:
Sie sind die Gleichungen des elektrischen Gleichgewichts des Rotors:
wo ist der Spannungsabfall im Ankerkreis, ist die Rotations-EMK.
Aus dieser Formel erhalten wir ein fast wichtiges Verhältnis:
Ersetzen Sie stattdessen
Und wir bekommen:
![]() .
.
Unter Verwendung dieses Ausdrucks kann man die mechanische Charakteristik des DPT n \u003d f (M) konstruieren, wenn die Last gegeben ist, d. H. M, man kann die entsprechende Rotationsfrequenz finden. Wenn in diesem Fall U \u003d U nom, Φ \u003d ном nom ist, haben wir eine natürliche mechanische Eigenschaft.
Die mechanischen Eigenschaften von DPT:
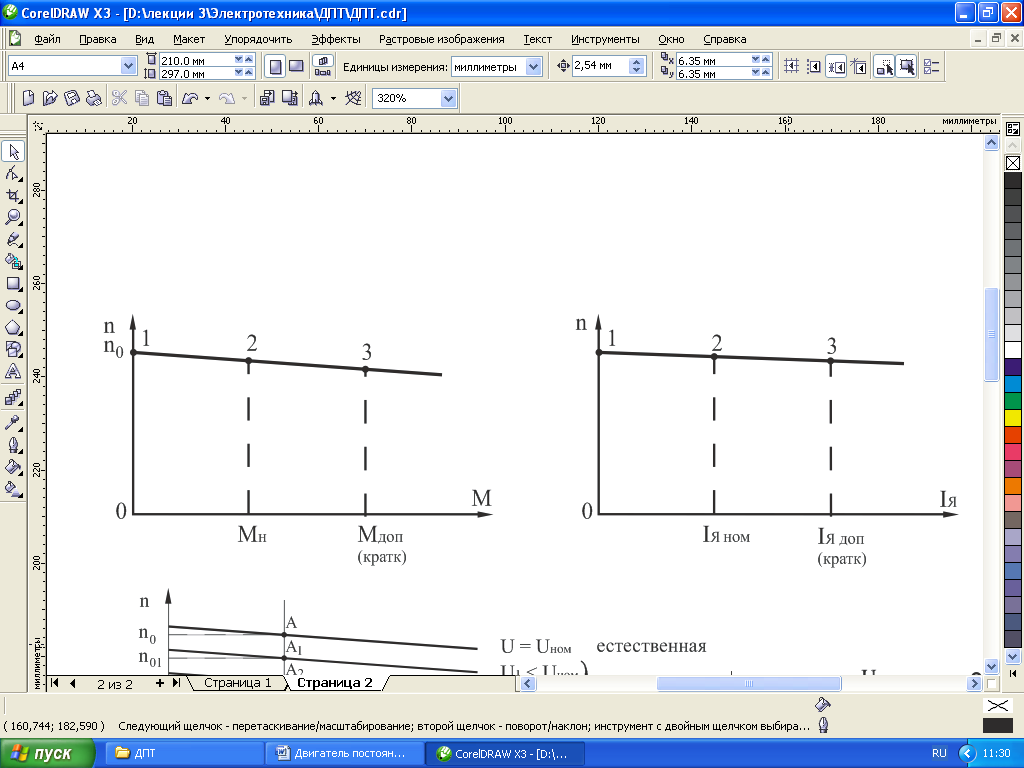
Punkt "1" - Leerlauf; Koordinaten M \u003d 0, n \u003d n 0;
"2" - Nennmodus; Koordinaten M n, n n;
"3" - maximal zulässige Kurzzeitbelastung.
Abschnitt 1-2 - Zulässiger Dauerbetrieb.
Abschnitt 2-3 - nur Kurzarbeit zulässig.
Normalerweise füge ich hinzu \u003d (2 ÷ 2,5) I I nom.
DPT-Geschwindigkeitsregelung:
![]() ,
,
wo ist der Widerstand der Ankerkette?
Woher kommt es? die Fähigkeit, die Geschwindigkeit zu steuern auf drei Arten: ,,.
1. Berücksichtigen Sie die künstlichen mechanischen Eigenschaften bei der Geschwindigkeitsregelung. Änderung des Scheiterns.
Offensichtlich ist gemäß den Betriebsbedingungen des Motors eine Änderung nur in Richtung der Abnahme möglich, und daher kann die Motordrehzahl nur nach unten eingestellt werden, während die Leerlaufdrehzahl (Punkt "1") verringert wird.
Die Eigenschaften haben folgende Form:
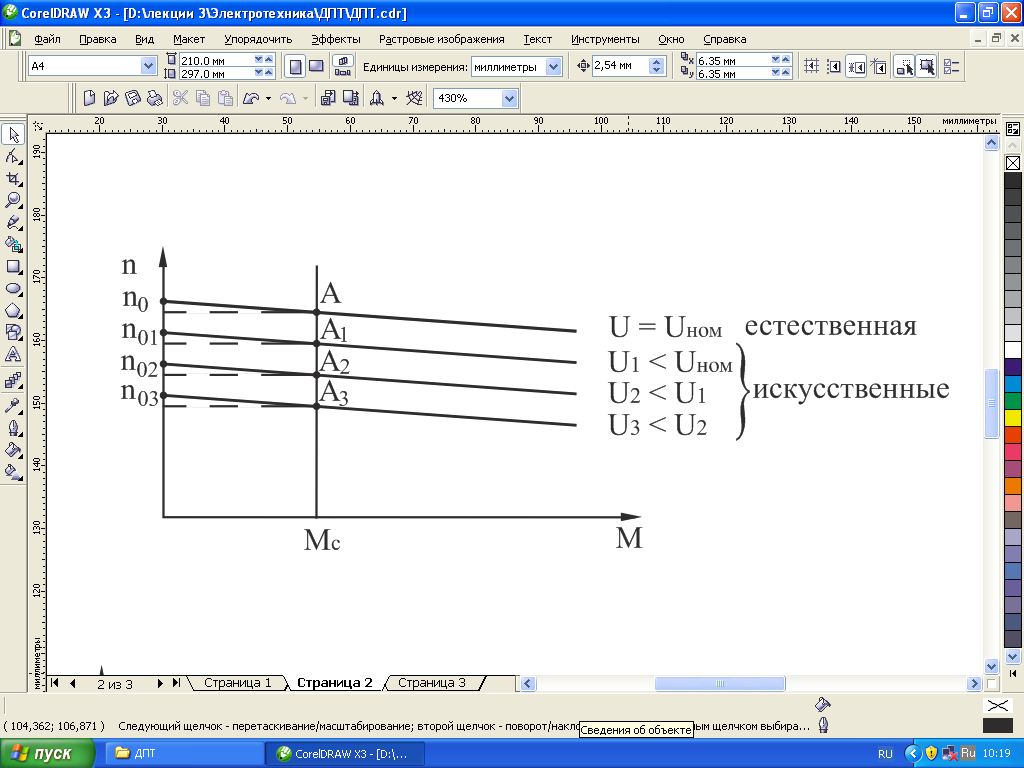
Wenn die Belastung des Motors durch die Kennlinie M C dargestellt wird, ist es durch Ändern der Spannung möglich, unterschiedliche Drehzahlen von n A bis n A3 zu erhalten.
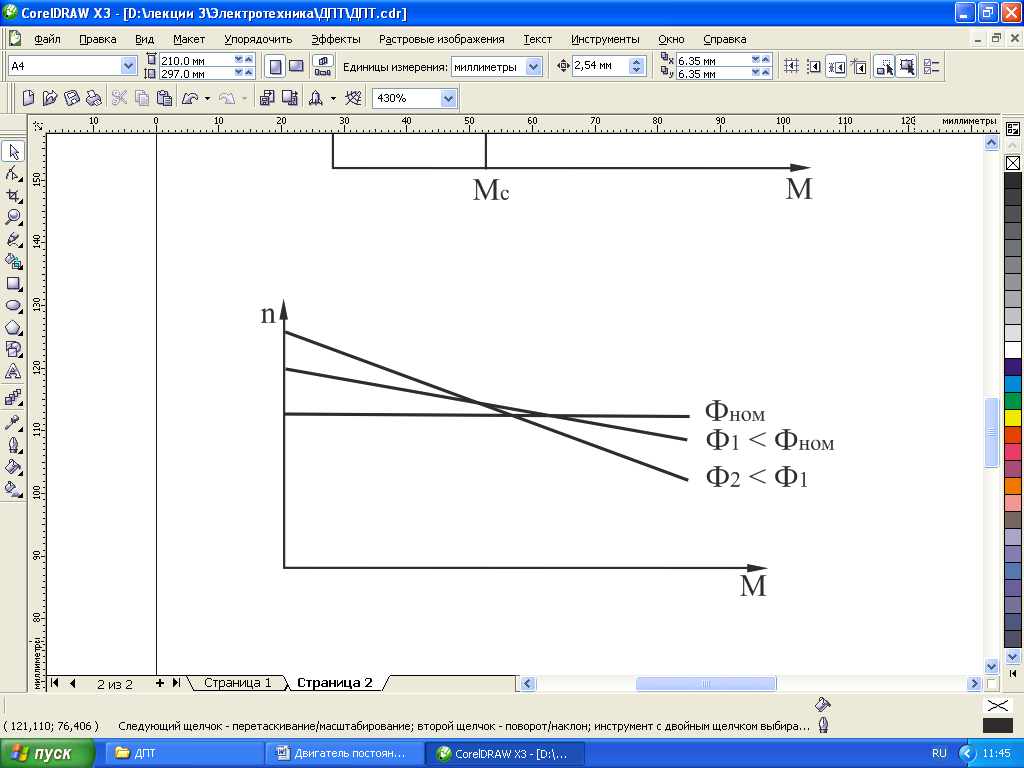
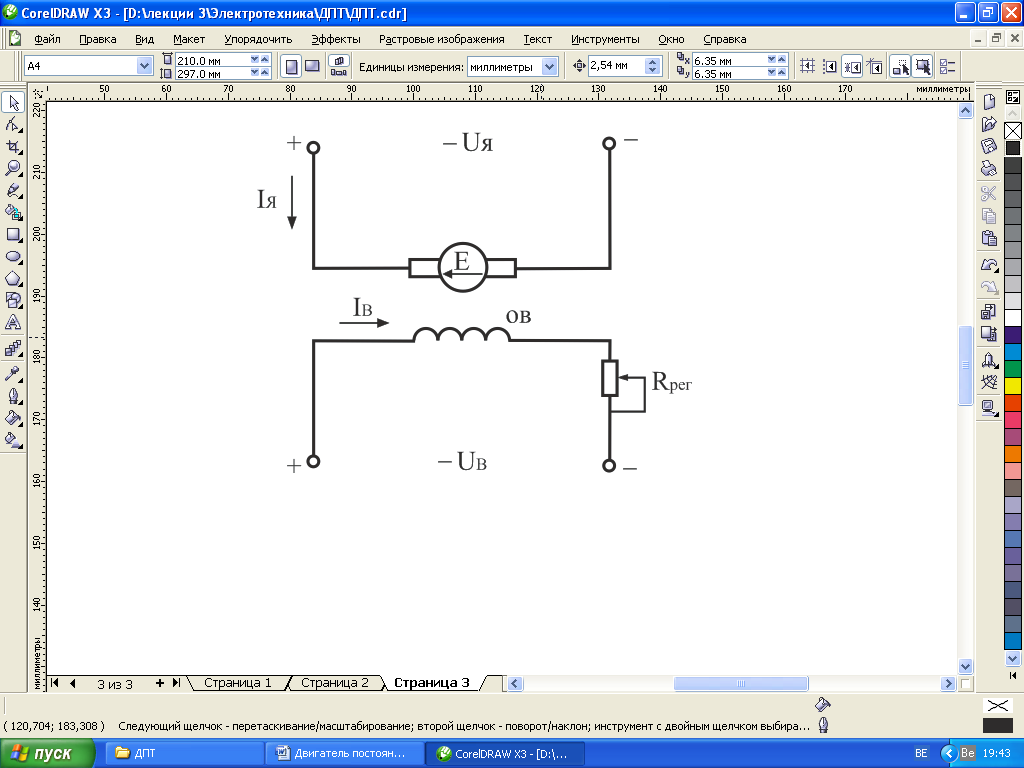
2. Geschwindigkeitsregelung durch Änderungen in der Größe des Magnetflusses.
Die Größe des Magnetflusses kann unter Verwendung des Stroms I B, beispielsweise eines Rheostaten, nur in Richtung der Abnahme geändert werden. Eine Abnahme des Magnetflusses erhöht die Geschwindigkeit. Auf diese Weise kann nur die Aufwärtsgeschwindigkeit durch den Magnetfluss gesteuert werden.
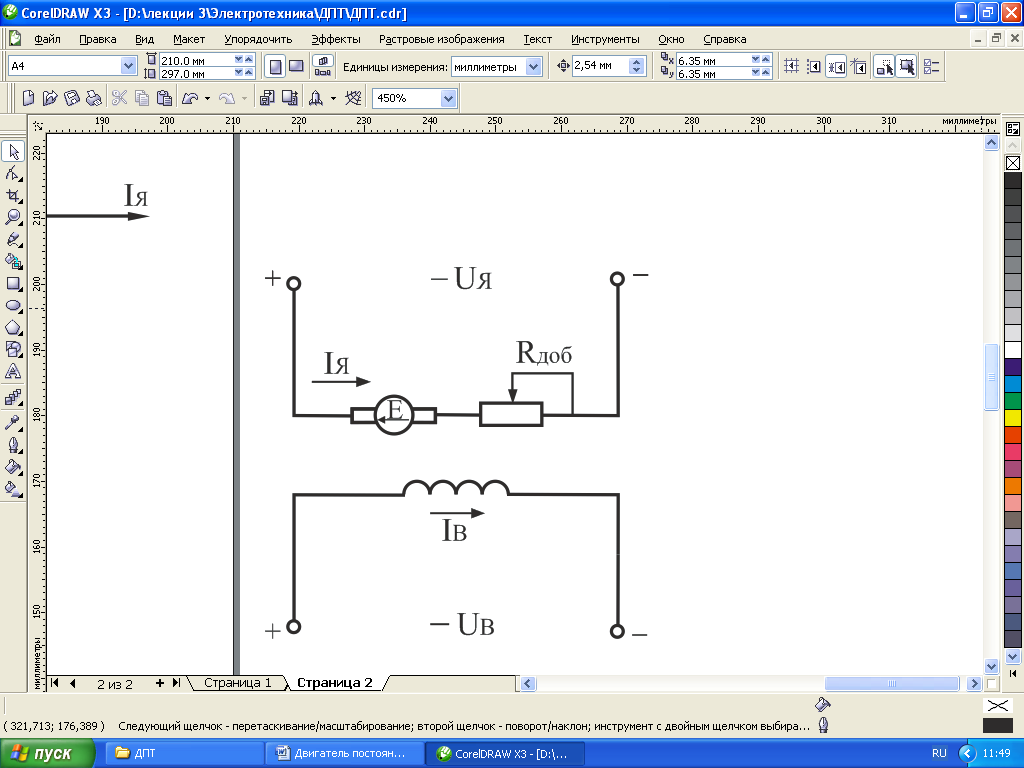
3. Berücksichtigen Sie die mechanischen Eigenschaften der Geschwindigkeitsregelung. Änderung des Widerstands der Ankerkette.
unabhängig von R p haben daher die künstlichen Eigenschaften einen gemeinsamen Punkt.
Der Anlaufstrom bei n \u003d 0 und E \u003d 0 hat die Form und erreicht unannehmbar große Werte, wodurch der Motor nicht starten kann. Um die Anlaufströme zu reduzieren, wird zusätzlicher Widerstand in den Ankerkreis eingeführt:
Der Strom nimmt ab und die Charakteristik hat die Form:

Funktionsprinzip (am Beispiel des Motors parallele Anregung) Wenn dem Motor die Spannung U zugeführt wird, fließt der Strom I in durch den Erregerkreis und der Strom I I durch den Ankerkreis. Der Erregerstrom erzeugt den MDF F in \u003d I in W in, der den Magnetfluss F in der Maschine anregt. Der Strom des Ankers erzeugt wiederum einen magnetischen Fluss der Reaktion des Ankers f I. Der resultierende magnetische Fluss Ф rez \u003d Ф в + Ф я.
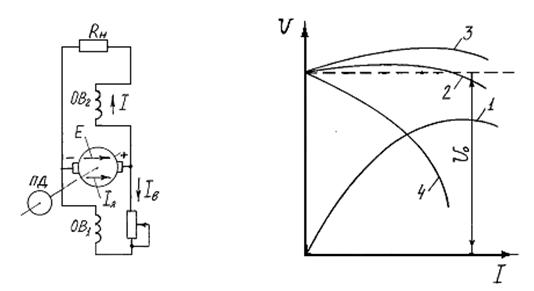
Abb. 1.23 Abb. 1.24
Im Ankerkreis erzeugt der Strom I i einen Spannungsabfall R i I i. In Übereinstimmung mit dem Gesetz der elektromagnetischen EMV-Kraft wird bei Wechselwirkung des Stroms I I und des magnetischen Flusses Ф ein Drehmoment M BP erzeugt. Im stationären Zustand M VR. \u003d M pr. Wenn die Leiter des Ankers das Magnetfeld F res kreuzen, in ihnen gemäß dem Gesetz elektromagnetische Induktion EMP induzierte EMF, die gegen die Spannung des Netzwerks U gerichtet ist.
Klassifizierung von Motoren. Gemäß dem Einschlussschema der Erregerwicklungen der Hauptpole werden Gleichstrommotoren in Motoren mit unabhängiger, paralleler, Reihen- und gemischter Erregung unterteilt.
In Motoren unabhängige Erregung Die Feldwicklung wird von einer separaten Gleichspannungsquelle gespeist. Bei parallelen Feldmotoren sind die Feldspule und die Ankerspule parallel geschaltet und werden von einer einzigen Quelle gespeist. Bei sequentiellen und gemischten Erregermotoren ist eine Erregerwicklung in Reihe mit der Ankerwicklung geschaltet. Bei Motoren mit geringer Leistung kann mit Permanentmagneten ein Anregungsfluss erzeugt werden. Die am weitesten verbreiteten Motoren sind Parallel- und Mischanregungen.
Grundgleichungen und Größen, die Motoren charakterisieren. Diese Werte sind: mechanische Leistung auf der Welle P 2, die Versorgungsspannung U, der vom Netzwerk I aufgenommene Strom, der Ankerstrom I I, der Erregerstrom I in, die Drehzahl n, elektromagnetisches Moment M um. Die Beziehung zwischen diesen Werten wird beschrieben:
Ø Gleichung des elektromagnetischen Moments:
M em \u003d C m I i F;
Ø Gleichung des elektrischen Zustands der Ankerkette:
U \u003d E pr + R i I i; (1.4)
E CR \u003d C E nF;
Ø Momentengleichung:
M em \u003d M s + M Schweiß + M d,
wobei M mit - dem durch die Last erzeugten Widerstandsmoment auf der Welle; M Schweißverlustmoment, das durch alle Arten von Verlusten im Motor verursacht wird; M d - das dynamische Moment, das durch Trägheitskräfte erzeugt wird;
Motorspezifikationen. Die wichtigste der Eigenschaften ist die mechanische n (M s) - die Abhängigkeit der Drehzahl n vom Moment auf der Welle (im Folgenden wird der Index "c" weggelassen) bei U \u003d const, I в \u003d const. Es zeigt die Auswirkung der mechanischen Belastung (Drehmoment) auf die Motorwelle auf die Drehzahl, was besonders wichtig ist, wenn Motoren ausgewählt und betrieben werden. Andere Motoreigenschaften: Einstellen von n (I in), Hochgeschwindigkeits-n (I i), Arbeiten von M, P 1, n, I, h (P 2) werden hier nicht im Detail betrachtet.
Mechanische Eigenschaften können natürlich und künstlich sein. Unter natürlich Unter Eigenschaften werden Eigenschaften verstanden, die ohne zusätzliche Widerstände in der Schaltung genommen werden, beispielsweise Rheostate in den Anker- oder Erregungsschaltungen. künstlich - bei Vorhandensein solcher Widerstände.
Mechanische Gleichung Motorspezifikationen. Es kann aus (1.1) erhalten werden. Wir ersetzen dann E durch seinen Wert in (1.4)
n \u003d (U - R i I i) / С Е F. (1,5)
Wenn wir I durch seinen Wert aus (1.2) ersetzen, erhalten wir die Gleichung der mechanischen Eigenschaften:
n \u003d ![]() (1.6)
(1.6)
Die Art der mechanischen Eigenschaften wird durch die Art der Abhängigkeit des Laststroms des Motors bestimmt, die wiederum vom Erregerwicklungskreis abhängt.
Motor rückwärts fahren. Unter der Umkehrung des Motors versteht man die Änderung der Drehrichtung seines Ankers. Mögliche Wege Umkehrungen ergeben sich aus Beziehung (1.2). Wenn Sie die Richtung des Ankerstroms oder den Fluss der Maschine ändern, ändert sich das Vorzeichen und damit die Richtung des Drehmoments. In der Praxis wird dies durch Schalten der Leitungen oder der Ankerwicklung oder der Feldwicklung erreicht. Das gleichzeitige Schalten der Anschlüsse beider Wicklungen oder eine Änderung der Polarität der den Motor versorgenden Spannung (mit Ausnahme eines unabhängigen Erregermotors) führt jedoch zu einer Änderung des Vorzeichens des Drehmoments und führt daher nicht zu einer Änderung der Drehrichtung.
Motorstart Gleichstrom. Es gibt zwei grundlegende Anforderungen für das Starten von Motoren: Bereitstellung des Drehmoments, das zum Abziehen und Beschleunigen des Ankers erforderlich ist, und Verhinderung eines übermäßig hohen Stroms, der für den Motor gefährlich ist, wenn er durch den Anker fließt. Praktisch sind drei Startmethoden möglich: Direktstart, Start, wenn der Rheostat im Ankerkreis enthalten ist, und Start wann unterspannung in der Kette der Anker.
Beim direkten Start schaltet sich der Ankerkreis sofort bei voller Spannung ein. Da der Anker im ersten Moment des Starts stationär ist (n \u003d 0), gibt es keine Gegen-EMK (E CR \u003d C E nF). Dann folgt aus (1.4), dass der Einschaltstrom des Ankers I i ist, n \u003d U / R i.
Da R i \u003d 0,02 ≤ 1,10 Ohm, dann ist I I, n \u003d (50 ≤ 100) I nom, was nicht akzeptabel ist. Ein direkter Start ist daher nur für Motoren mit geringer Leistung möglich, bei denen I I, n (4¸6) I nom und die Beschleunigung des Motors weniger als 1 s dauert.
Beginnen Sie, wenn Sie den Startrheostat R p nacheinander mit dem Anker einschalten. Betrachten Sie das Beispiel der Schaltung in Abb. 1,25. Der Anlaufstrom ist in diesem Fall gleich:
I i, n \u003d U / (R i + R p). (1.7)
Der Widerstand R p \u003d U / I i, n - R i wird so gewählt, dass im Anfangsstart des Starts, wenn E pr \u003d 0, I i, n \u003d (1,4 · 2,5) I nom (eine größere Zahl bezieht sich auf Motoren) weniger Leistung).
Wenn der Anker beschleunigt, nimmt E ol zu, was die Spannung am Anker verringert (d. H. Der Zähler nimmt ab (1,7)), und der Widerstand des Rheostaten R p wird angezeigt.
Vor dem Start wird der Rheostat R p angezeigt, der erforderlich ist, um einen maximalen Durchfluss und damit den Moment beim Start sicherzustellen (M p \u003d C m I I, p F). Wenn der Anker beschleunigt, wird der Rheostat R p eingeführt, bis die gewünschte Geschwindigkeit erreicht ist.
Das Starten mit begrenztem Anlaufstrom ist möglich, wenn der Motoranker von einer separaten Quelle (Generator, Gleichrichter) mit einstellbarer Spannung versorgt wird. Die Einschaltstrombegrenzung und die gleichmäßige Beschleunigung des Motors werden durch einen allmählichen Anstieg der Spannung am Anker von Null auf den gewünschten Wert erreicht.
Die betrachtete Methode wird in Steuerungs- und Regelungssystemen von leistungsstarken Gleichstrommotoren verwendet (siehe 1.14.3).
§ 115. EIGENSCHAFTEN VON DC-MOTOREN
Die Betriebseigenschaften von Motoren werden durch ihre Leistungsmerkmale bestimmt, die die Abhängigkeiten von der Anzahl der Umdrehungen t, dem Drehmoment Me, der Stromaufnahme I, der Leistung P1 und dem Wirkungsgrad η von der Nettoleistung auf der Welle P2 sind. Diese Abhängigkeiten entsprechen den natürlichen Bedingungen des Motors t. die Maschine ist nicht geregelt und die Netzspannung bleibt konstant. Also
wenn sich die Nettoleistung P2 (d. h. die Last auf der Welle) ändert, ändert sich auch der Strom im Anker
maschinen, dann wird die Leistung oft in Abhängigkeit vom Strom im Anker aufgebaut. Die Abhängigkeiten des Drehmoments und der Drehzahl vom Strom im Anker für einen Parallelerregungsmotor sind in Abb. 1 dargestellt. 152, und das Hundertendiagramm ist oben gezeigt (siehe Fig. 151).
Die Motordrehzahl wird durch folgenden Ausdruck bestimmt:
\u003e Mit zunehmender Belastung der Motorwelle steigt auch der Strom im Anker. Dies führt zu einer Erhöhung des Spannungsabfallwiderstands der Ankerwicklung und der Bürstenkontakte.
Da der Erregerstrom unverändert bleibt (die Maschine ist nicht geregelt), ist auch der Magnetfluss konstant. Mit zunehmendem Strom im Anker nimmt jedoch der Entmagnetisierungseffekt des Ankerreaktionsflusses zu und der Magnetfluss Φ nimmt geringfügig ab. Eine Zunahme von II bewirkt eine Abnahme der Motordrehzahl und eine Abnahme von Φ erhöht die Drehzahl. Typischerweise beeinflusst der Spannungsabfall die Drehzahländerung etwas stärker als die Reaktion des Ankers, so dass mit zunehmendem Strom im Anker die Drehzahl abnimmt. Die Drehzahländerung für einen Motor dieses Typs ist unbedeutend und überschreitet 5% nicht, wenn sich die Last von Null auf Nennwert ändert, dh parallele Erregermotoren haben eine starre Drehzahlkennlinie.
Bei konstantem Magnetfluss erscheint die Abhängigkeit des Moments vom Strom im Anker als gerade Linie. Aber unter dem Einfluss

Das Drehmoment des Ankerreaktionsmotors mit zunehmender Last bewirkt eine gewisse Abnahme des Magnetflusses und die Abhängigkeit des Moments geht geringfügig unter eine gerade Linie.
Das Schema des sequentiellen Erregungsmotors ist in Fig. 4 gezeigt. 153. Der Startrheostat dieses Motors hat nur zwei Klemmen, da die Feldwicklung und der Anker eine Reihenschaltung bilden. Die Motoreigenschaften sind in Abb. 1 dargestellt. 154. Die Anzahl der Umdrehungen des sequentiellen Erregungsmotors wird durch den folgenden Ausdruck bestimmt:
![]()
dabei ist rc der Widerstand der Serienfeldwicklung. In einem Motor mit sequentieller Erregung bleibt der Magnetfluss nicht konstant, sondern ändert sich stark mit einer Änderung der Last, was eine signifikante Änderung der Geschwindigkeit verursacht. Da der Spannungsfall im Ankerwiderstand und in der Feldwicklung im Vergleich zur angelegten Spannung sehr klein ist, kann die Anzahl der Umdrehungen durch folgenden Ausdruck näherungsweise bestimmt werden:
Wenn wir die Sättigung von Stahl vernachlässigen, können wir den Magnetfluss berücksichtigen, der proportional zum Strom in der Feldspule ist, der gleich dem Strom im Anker ist. Daher ist in einem Motor mit sequentieller Erregung die Drehzahl umgekehrt proportional zum Strom im Anker und die Anzahl der Umdrehungen nimmt mit zunehmender Last stark ab, d. H. Der Motor hat eine weiche Drehzahlkennlinie. Mit abnehmender Last steigt die Motordrehzahl. Bei leerlauf (Iя \u003d 0) Die Motordrehzahl steigt unendlich an, dh der Motor ist voneinander beabstandet.
Somit ist eine charakteristische Eigenschaft von Motoren mit sequentieller Erregung die Unzulässigkeit des Lastabwurfs, d. H. Im Leerlauf oder bei niedrigen Lasten. Der Motor hat eine zulässige Mindestlast von 25-30% des Nennwerts. Wenn die Last geringer als die minimal zulässige Drehzahl des Motors ist, steigt sie stark an, was zu seiner Zerstörung führen kann. Wenn daher Entladungen oder plötzliche Lastreduzierungen möglich sind, ist die Verwendung von Reihenerregungsmotoren nicht akzeptabel.
Bei Motoren mit sehr geringer Leistung führt der Lastabwurf nicht zu einer Trennung, da die mechanischen Verluste des Motors eine ausreichend große Last für ihn darstellen.
Das Drehmoment des sequentiellen Erregungsmotors kann angesichts der proportionalen Beziehung zwischen dem Magnetfluss und dem Strom im Anker (Ф \u003d С "Iя) durch den folgenden Ausdruck bestimmt werden:
wobei K ’\u003d KC’
d.h. Das Drehmoment ist proportional zum Quadrat des Stroms. Bei hohen Strömen wirkt sich jedoch die Sättigung des Stahls aus und die Abhängigkeit des Moments nähert sich einer geraden Linie. Motoren dieses Typs entwickeln daher bei niedrigen Drehzahlen große Drehmomente, was beim Starten großer Trägheitsmassen und Überlastungen unerlässlich ist. Diese Motoren sind in Transport- und Hebevorrichtungen weit verbreitet.
Bei gemischter Anregung ist sowohl eine Konsonanten- als auch eine Gegenaktivierung der Anregungswicklungen möglich.
Motoren mit Ein-Aus-Wicklungen sind nicht weit verbreitet, da sie schlechte Starteigenschaften aufweisen und instabil sind.
Die Drehzahlkennlinien von Motoren mit gemischter Erregung nehmen eine Zwischenposition zwischen den Eigenschaften von Motoren mit paralleler und sequentieller Erregung ein.
Mit zunehmendem Strom im Anker nimmt die Anzahl der Umdrehungen des Ankers aufgrund eines Anstiegs des Magnetflusses, der durch einen Anstieg des Stroms in der Reihenerregungswicklung verursacht wird, stärker ab als bei parallelen Erregermotoren. Wenn der Motor im Leerlauf läuft, tritt der Motor mit gemischter Erregung nicht auf, da der Magnetfluss aufgrund des Vorhandenseins einer parallelen Feldwicklung nicht auf Null abfällt.
Mit zunehmender Last bei Motoren mit gemischter Erregung steigt der Magnetfluss und das Drehmoment stärker als bei Motoren mit paralleler Erregung, jedoch in geringerem Maße als bei Motoren mit sequentieller Erregung.
1. Das Gerät von Gleichstrommaschinen.
Gleichstrommaschinen, die sowohl im Motor- als auch im Generatormodus betrieben werden können, haben mehrere Vorteile. Beim Starten des Motors entsteht ein großes Anlaufmoment. Daher werden solche Iroko-Motoren als Traktion in Elektrofahrzeugen eingesetzt. Die weiten Grenzen und die Laufruhe der Drehzahlregelung bestimmen den Einsatz von Gleichstrommotoren in einer Vielzahl von automatischen Steuerungssystemen.
Gleichstromgeneratoren werden zur Stromversorgung verschiedener Aggregate (insbesondere hochwertiger Schweißgeräte) verwendet. Die Leistung von Gleichstrommaschinen ist sehr unterschiedlich:
von ein paar Watt bis zu zehn Kilowatt. Der Transport nutzt Motoren mit einer Spannung von 550 V und einer Leistung von 40 - 45 kW (Straßenbahnen), einer Spannung von 1.500 V und einer Leistung von bis zu 12.000 kW (elektrische Lokomotiven). Der Wirkungsgrad bei Gleichstrommaschinen ist umso höher, je mehr Leistung. Bei einer Leistung von bis zu 100 W beträgt der Wirkungsgrad 62% und bei einer Leistung von bis zu 100 kW erreicht der Wirkungsgrad 91%. Der Nachteil von Gleichstrommaschinen ist das Vorhandensein einer Bürstenkollektoranordnung, die eine der unzuverlässigsten Maschinenkomponenten darstellt. Betrachten Sie das Gerät der einfachsten Gleichstrommaschine:
1 - Pole, die normalerweise eine Spule mit einem Kern darstellen,
2 - Anker (oder Rotor) - rotierendes Teil,
3 - Leiter in den Rillen des Ankers.
Der feste Teil, an dem die Pole montiert sind, wird als Stator oder Induktor bezeichnet. Der Induktor dient zur Erzeugung des Hauptmagnetfeldes der Maschine. GN ist eine geometrische neutrale Linie, die in der Mitte zwischen benachbarten Polen verläuft.
Das wichtigste Konstruktionsmerkmal von Gleichstrommaschinen ist das Vorhandensein einer Bürsten-Kollektor-Baugruppe: 1 - Bürste, 2 - Kollektorplatte. Die Befunde der einzelnen Abschnitte der Ankerwicklung sind für die Kollektorplatten geeignet. Bürstensammlereinheit führt aus:
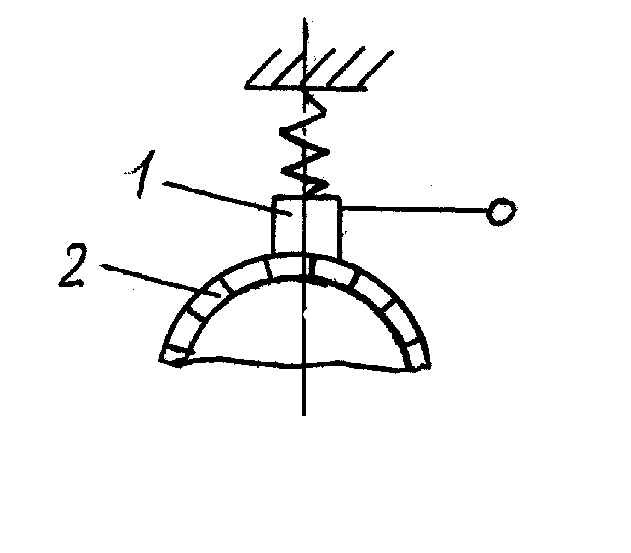
Gleitkontakt zwischen festen Außenklemmen und rotierenden Abschnitten der Ankerwicklung,
Stromgleichrichtung im Generatormodus,
Wandeln Sie DC in AC (Invertieren) im Motormodus um.
Gleichstrommaschinen sind wie viele andere elektrische Maschinen reversibel, d.h. Ein und dieselbe Maschine kann sowohl als Generator als auch als Motor betrieben werden.
2. Das Funktionsprinzip von Generator und Motor.
Im Generatormodus dreht sich der Anker der Maschine unter Einwirkung eines äußeren Moments. Zwischen den Polen des Stators dringt ein konstanter Magnetfluss in den Anker ein. Die Leiter der Ankerwicklung bewegen sich in einem Magnetfeld und daher wird in ihnen eine EMF induziert, deren Richtung durch die Regel der "rechten Hand" bestimmt werden kann. In diesem Fall entsteht auf einer Bürste ein positives Potential relativ zur zweiten. Wenn die Last an die Klemmen des Generators angeschlossen ist, fließt Strom darin. Nach dem Drehen der Anker in einem bestimmten Winkel werden die Bürsten mit einem anderen Plattenpaar verbunden, d. H. verbunden mit einer anderen Windung der Ankerwicklung, in der die EMF die gleiche Richtung hat. Somit erzeugt der Generator
elektrischer Strom, und die Richtung dieses durch die Last fließenden Stroms ändert sich nicht.
Wenn die Last an den Generator angeschlossen ist und der Ankerstrom auftritt, entsteht auf der Welle ein elektromagnetisches Moment gegen die Drehrichtung des Ankers. Im Motormodus klemmt die Maschine konstante Spannungund Strom fließt durch die Ankerwicklung. Die Leiter der Ankerwicklung befinden sich im Magnetfeld der Maschine, das durch den Erregerstrom erzeugt wird, und daher nach dem Gesetz auf ihnen
Ampere, Kräfte werden wirken. Die Kombination dieser Kräfte erzeugt ein Drehmoment, unter dessen Wirkung sich der Anker dreht. Wenn sich der Anker dreht, wird in seiner Wicklung eine EMK induziert, die auf den Strom gerichtet ist, und daher wird sie bei Motoren als Gegen-EMK bezeichnet.
3. EMF-Gleichungen von Anker und Drehmoment.
Betrachten Sie einen der Leiter in der Nut des Ankers. Lassen Sie es sich mit einer linearen Geschwindigkeit V bewegen (wenn sich der Anker dreht), dann wird die EMF in diesem Leiter induziert:
E \u003d B Mi l I V sin  ,
,
wo \u003d 90, lя ist die Länge des aktiven Teils des Ankers, B cf ist die durchschnittliche Magnetfeldinduktion in der Lücke.
Sei 2a die Anzahl der parallelen Zweige. Da der EMF gleich dem EMF eines Zweigs ist, können wir schreiben:

wobei E i - die gewünschte EMF des Ankers, N - die Anzahl aller Leiter des Ankers ist.
dabei ist Ф der magnetische Fluss eines Pols und S der Bereich, in den dieser Fluss eindringt

hier ist p die Anzahl der Polpaare (p \u003d 1,2, ...).
Die Geschwindigkeit V kann als Drehfrequenz des Ankers n ausgedrückt werden:
Einsetzen der erhaltenen Ausdrücke in die Formel für E i:

dann bekommen wir endlich:
E i \u003d C E f n.
Es ist ersichtlich, dass die EMF des Ankers proportional zur Drehfrequenz des Ankers und zum magnetischen Fluss der Pole ist. Mit dem Ampere-Gesetz ermitteln wir die Kraft, mit der das Anregungsfeld auf einen Leiter des Ankers wirkt:
F \u003d B Mi l I I sündigt
,
hier \u003d 90, I ist der Strom im Leiter.
Diese Kraft erzeugt ein Drehmoment:
dabei ist D der Durchmesser des Ankers. Multipliziert mit der Gesamtzahl der Leiter N erhalten wir das Gesamtmoment:
Die durchschnittliche Induktion B cf wie zuvor wird erhalten, indem der magnetische Fluss eines Pols durch die von diesem Fluss durchdrungene Fläche geteilt wird:
Da sich der Ankerstrom entlang paralleler Zweige ausbreitet, wird der Strom in einem Leiter durch den Ausdruck bestimmt:

Wenn wir die Ausdrücke für B cf und I in die Formel des allgemeinen Moments einsetzen, erhalten wir:
Wenn Sie einen Designfaktor einführen
dann können wir endlich schreiben:
Wie zu sehen ist, ist das elektromagnetische Moment der Gleichstrommaschine proportional zum Magnetfluss der Pole und zum Ankerstrom.

Die oben erhaltene Formel für die EMF des Ankers Eya gibt einen Durchschnittswert der EMF an. Tatsächlich schwankt (pulsiert) sein Wert zwischen zwei Grenzwerten - E min und E max. Wenn sich der Anker dreht, wird ein Teil der Windungen, der durch Bürsten kurzgeschlossen wird, von parallelen Zweigen abgeschaltet, und während der Drehung des Ankers um einen Winkel, der einer Kollektorplatte entspricht, kann sich die Summe der momentanen EMF-Werte etwas ändern. Der daraus resultierende Maximalwert der EMK-Pulsationen beträgt E \u003d 0,5 (E max -E min) und hängt von der Anzahl der Kollektorplatten ab. Wenn diese Zahl beispielsweise von 8 auf 40 steigt, sinkt der Wert von E von 4 V auf 0,16 V.
4. Die Reaktion des Ankers in Gleichstrommaschinen.
Im Leerlauf der Gleichstrommaschine wird das Magnetfeld nur durch die Wicklungen der Pole erzeugt. Das Auftreten von Strom in den Leitern des Ankers unter Last geht mit dem Auftreten des Magnetfelds des Ankers einher. Da die Richtung der Ströme in den Leitern zwischen den Bürsten konstant ist, ist das Feld des rotierenden Ankers relativ zu den Bürsten und Feldpolen festgelegt.
Die Ankerwicklung ähnelt einem Magneten, dessen Achse mit der Bürstenlinie zusammenfällt. Wenn die Bürsten auf geometrischen Neutralen montiert sind, erfolgt die Ankerströmung quer zur Erregerströmung, und ihr Einfluss auf letztere wird als Querreaktion des Ankers bezeichnet. Nachdem wir den Vektor des resultierenden Stroms erstellt haben, sehen wir, dass er sich jetzt relativ zur geometrischen Achse der Hauptpole dreht. Das Feld der Maschine wird asymmetrisch, die physikalischen Neutralen drehen sich relativ geometrisch. Im Generator werden sie in Drehrichtung des Ankers im Motor verschoben - gegen die Drehrichtung des Ankers.
Mit physikalischer Neutralität ist eine Linie gemeint, die durch die Mitte des Ankers und den Leiter der Ankerwicklung verläuft, in der die durch den resultierenden Magnetfluss induzierte EMK Null ist. Die Querreaktion des Ankers hat wenig Einfluss auf die Leistung der Maschine, dieser Effekt wird in der Regel nicht berücksichtigt. Wenn die Bürsten jedoch aus dem geometrischen Neutral verschoben werden, erscheint eine Längskomponente im Ankerstrom, deren Wirkung auf den Polstrom als Längsarmreaktion bezeichnet wird. Es kann entweder magnetisierend oder entmagnetisierend sein. Im allgemeinen Fall führt die Reaktion des Ankers zu einer Verzerrung des Feldes unter den Polen und einer Änderung des Polflusses. Ersteres kann zu einer signifikanten Erhöhung der Funkenbildung unter den Bürsten führen (bis zum Auftreten eines kreisförmigen Lichts am Kollektor), und letzteres im Generator ändert die Spannung an den Klemmen und im Motor das Drehmoment und die Drehzahl des Ankers.
Um die Reaktion zu schwächen, vergrößern die Anker den Luftspalt zwischen Stator und Anker, verwenden spezielle kurzgeschlossene Windungen in den Nuten der Polstücke. Bei Hochleistungsmaschinen wird hierfür eine spezielle Ausgleichswicklung eingesetzt. Es passt in die Nuten der Polstücke und ist in Reihe mit der Kette des Ankers geschaltet, wobei seine Strömung die Längsströmung des Ankers ausgleicht.
 Auto-Generator und wie man es überprüft
Auto-Generator und wie man es überprüft Sichere Verwendung von elektrischen Haushaltsgeräten
Sichere Verwendung von elektrischen Haushaltsgeräten Wirtschaftliche Elektroherde
Wirtschaftliche Elektroherde