Bundesamt für Bildung
Staatliche Bildungseinrichtung
Höhere berufliche Bildung
Pacific State University
AUTOMATISCHE STEUERGRUNDLAGEN
Kurzer Kurs Vorlesungen für Studierende der Ingenieurwissenschaften der Korrespondenzabteilung
Chabarowsk
Abteilung von AiS Togu
Einführungsvortrag
1. Kursfach
1.1. Zweck, Relevanz und aktuelle Rolle der TAU.
Die Theorie der automatischen Steuerung untersucht die allgemeinen Prinzipien des Aufbaus automatischer Systeme und Methoden für ihre Untersuchung, unabhängig von der physikalischen Natur der in ihnen ablaufenden Prozesse. TAU ist die theoretische Grundlage automatische Systeme in verschiedenen Bereichen der Technologie. Es bietet die grundlegende theoretische Grundlage für die Erforschung und das Design jeder automatischen und automatisierte Systeme in allen Bereichen der Technologie und der Volkswirtschaft. Die TAU untersucht die Managementprozesse und -aufgaben bei der Erstellung von Feedback-Systemen.Im 20. Jahrhundert unter den Bedingungen technischer und informativer Revolutionen, die Menschen von der Durchführung von Routinen befreien. Monotone und schwere Arten von Arbeit, jede Produktion ist mit Mitteln der Mechanisierung und Automatisierung gesättigt. Daher muss ein Ingenieur jeder Fachrichtung an der Konstruktion, Berechnung und Untersuchung des Systems teilnehmen automatische Regelung oder Einrichtungen betreiben, die mit solchen automatischen Vorrichtungen ausgestattet sind.
Zu Beginn wurde TAU gegründet, um die Statistik und Dynamik der Prozesse der automatischen Steuerung von Objekten zu untersuchen - Produktion, Energie, Transport usw. Ihre Hauptbedeutung ist in unserer Zeit erhalten geblieben.
2. Das Wesentliche des Problems der automatischen Steuerung und Definition von Konzepten
^
2.1. Aktivitäten und verschiedene Arten von Operationen
Im Russischen umfasst der Begriff "Management" eine Vielzahl von Konzepten, darunter: Oberste Regierung des Staates, Management der staatlichen Gebietseinheit, Volkswirtschaft, Unternehmen, Institution, Werkstatt im Allgemeinen, jeder Produktionsprozess.
Zweckmäßige menschliche Aktivitäten zur Erfüllung unterschiedlicher Bedürfnisse können in zwei Betriebsklassen unterteilt werden: Arbeitsvorgänge und Managementvorgänge.
Zu arbeitsabläufe umfassen Maßnahmen, die unmittelbar erforderlich sind, um den Prozess gemäß den Naturgesetzen durchzuführen, die den Prozessverlauf bestimmen (Drehung der Motorwelle, Spanabfuhr)
^ Der Ersatz menschlicher Arbeit im Arbeitsbetrieb wird genannt mechanisierung, dessen Zweck die Befreiung des Menschen von schweren Operationen, schädlichen Operationen, eintönig ist.
Menschliche Aktivitäten
Arbeitsabläufe
Management-Operationen
Mechanisierung
Automatisierung
Objektmanagement ist der Prozess der Beeinflussung, um den erforderlichen Prozessfluss im Objekt sicherzustellen oder die erforderliche Änderung seines Zustands.
Steuerungsvorgänge - Stellen Sie zum richtigen Zeitpunkt den Start, die Reihenfolge und die Beendigung einzelner Vorgänge bereit, indem Sie die erforderlichen Parameter für den Prozess selbst festlegen.
Der Satz von Steueroperationen bildet den Verwaltungsprozess. Dies kann Vorgänge wie die Überwachung des korrekten Betriebs von Geräten, die Gewährleistung eines fehlerfreien Betriebs, das Starten und Stoppen, das Einschalten von Backup-Hilfsgeräten und die Bereitstellung der erforderlichen Hilfsparameter umfassen, die einen kontrollierten Produktionsprozess charakterisieren.
^ Der Ersatz menschlicher Arbeitskräfte bei Steuerungsvorgängen wird als Automatisierung bezeichnet und technische Geräte, die Steueroperationen ausführen, sind automatische Geräte. Führen Sie alle Verwaltungsvorgänge aus ohne direkte menschliche Beteiligung heißtautomatische Steuerung und das System, das es implementiert -automatisches Steuersystem (ACS) .
Ein System, in dem nur ein Teil der Verwaltungsvorgänge automatisiert wird und der andere Teil (normalerweise der kritischste) von Personen ausgeführt wird, wird aufgerufen automatisiertes Steuerungssystem (ACS).
^
2.2. Gegenstand der Kontrolle und Wirkung
Störende Einflüsse 
Manager
Auswirkungen
Wochenende
Mengen


^ Verwaltungsobjekt - eine Reihe technischer Mittel - Maschinen, Werkzeuge, Mechanisierungswerkzeuge, die diesen Prozess ausführen .
Die äußere Umgebung hat tatsächlich zahlreiche Auswirkungen auf jedes Steuerobjekt, und wenn das Objekt eine „strukturelle Steifigkeit“ und eine „dynamische Festigkeit“ aufweist (Funktionen mit der erforderlichen Genauigkeit ausführen, trotz der Trägheitseigenschaften und unvermeidlichen Interferenzen), ist keine automatische Steuerung erforderlich.
Es ist praktisch unmöglich, alle Auswirkungen auf das Objekt zu berücksichtigen, so dass nur diejenigen im Sichtfeld verbleiben, die den größten Einfluss auf die Ausgabemengen haben und diese als Eingabeeffekte bezeichnen. Eingabeeinflüsse unter dem Gesichtspunkt ihres Einflusses auf die Aktionen des Objekts, auf seine Ausgabewerte werden in zwei Hauptgruppen unterteilt. Diejenigen, die die gewünschte Änderung im Verhalten eines Objekts bewirken, werden als Manager bezeichnet. In ihrer Abwesenheit hat das Kontrollproblem überhaupt keine Lösung. Bei manueller Steuerung wirkt der Bediener auf das Objekt und bei automatischer Steuerung auf das Steuergerät. Diejenigen Auswirkungen, die die Erreichung des Ziels beeinträchtigen und normalerweise nicht geändert werden können, werden als störend bezeichnet.
Die Steuerungsaufgabe besteht im Wesentlichen in der Bildung eines solchen Gesetzes zur Änderung von Steueraktionen, bei dem das gewünschte Verhalten des Objekts unabhängig vom Vorhandensein von Störungen erreicht wird.
^
3. Aufgaben der Theorie der automatischen Steuerung
Die Hauptziele von TAU sind die Untersuchung der statischen und dynamischen Eigenschaften automatischer Systeme und die Entwicklung von Systemen, die bestimmte technische Anforderungen erfüllen.
TAU untersucht zwei Hauptaufgaben:
Analyse von automatischen Steuerungssystemen
Synthese von automatischen Steuerungssystemen.
Die erste Aufgabe, die Aufgabe der Analyse, besteht darin, den Prozess eines bestimmten automatischen Steuerungssystems mit einer bestimmten Struktur und Elementen mit verschiedenen Parametern von Elementen und verschiedenen Arten von Auswirkungen auf das System zu untersuchen. Die Analyseaufgabe umfasst die Untersuchung der Stabilität von Systemen sowie die Untersuchung dynamischer und statischer Abweichungen, die während Steuerungsprozessen auftreten.
Die zweite Aufgabe, die Synthese, ist komplexer und besteht darin, ein automatisches Steuerungssystem aufzubauen. Es umfasst die Auswahl einer Steuergeräteschaltung, ihrer Elemente und ihrer Parameter.
Theoretisch kann jeder ATS als ein System zur Umwandlung der Antriebs- und Störsignale in ein Signal mit Ausgangsgrößen betrachtet werden.
Lass X \u003d ((x 1 , x 2 …., x n ) - eine Reihe kontrollierter Prozesskoordinaten (Ausgabewerte), Z \u003d (z 1 , z 2 …., z n ) - störende Einflüsse, U. = (u 1 , u 2 …., u n ) - Kontrollaktionen.
Mengen X, U, Z. je nach Art des Objektes sind durch verschiedene mathematische Abhängigkeiten verbunden. Im allgemeinen Fall
X \u003d W (Z, U), (1)
Wobei W ein Operator ist, der die Art der Abhängigkeit bestimmt.
Analyseaufgabe: Geben Sie Z, U und W an und Sie möchten X finden. Dies ist normalerweise eine passive Aufgabe. Hier müssen Sie nur X implementieren, ohne den Prozess zu stören.
Syntheseaufgabe: Es ist aktiv. - U, Z und die gewünschte Form von X sind angegeben, es ist erforderlich, ein solches W zu finden, um die Anforderung für X zu erfüllen.
Synthese der aktiven Kontrolle: Gegeben ist W und die gewünschte Form von X. Es ist erforderlich, ein solches U zu finden, dass X die festgelegten Anforderungen erfüllt.
^
3.1. TAR lineare Aufgaben:
Die komplexe und vielseitige Managementaufgabe beinhaltet in den allermeisten Fällen die enge Aufgabe der Regulierung. Da die automatische Regelung derzeit von praktischer Bedeutung ist, werden wir sie in Zukunft berücksichtigen.
Jeder Produktionsprozess ist durch eine Reihe von Indikatoren gekennzeichnet - einstellbare Parameter .
Die automatische Bereitstellung der erforderlichen Werte einstellbarer Parameter, die den Verlauf des Produktionsprozesses im Regelungsobjekt nach einem vorgegebenen Gesetz bestimmen, wird als automatische Regelung bezeichnet, die von einem automatischen Regelungssystem (ATS) bereitgestellt wird. Der TAU-Abschnitt, der sich damit befasst, heißt TAP. In unserem Kurs "Grundlagen der Theorie der automatischen Steuerung" werden wir uns mit den folgenden TAP-Problemen befassen.
Messung der dynamischen Eigenschaften und Eigenschaften verschiedener Arten von Verbindungen von automatischen Systemen jeglicher physikalischer Art und Konstruktion;
Erstellung von Funktions- und Strukturdiagrammen automatischer Steuerungs- und Regelungssysteme;
Die Konstruktion der dynamischen Eigenschaften dieser Systeme;
Definition von Fehlern und Genauigkeitsindikatoren geschlossener Systeme;
Untersuchung der Stabilität geschlossener Systeme;
Bewertung von Qualitätsindikatoren für Managementprozesse;
Bestimmung der Empfindlichkeit von Systemen gegenüber Änderungen von Parametern und anderen Faktoren;
Die Untersuchung verschiedener Arten von Korrekturvorrichtungen, die in das System eingeführt wurden, um die Genauigkeit und die dynamischen Eigenschaften zu verbessern.
Erstellung von Frequenz-, Wurzel- und anderen Synthesemethoden für Korrekturvorrichtungen sowie verschiedener Methoden zur Optimierung von Systemen anhand von Qualitätsindikatoren
^
4. Der Zweck von automatischen Steuerungssystemen (C A P)
. Die Namen selbst enthalten den Zweck, die Unterschiede sind aus der Form der Definitionsfunktion ersichtlich.
Ein stabilisierendes automatisches Steuersystem ist ein System, das dazu ausgelegt ist, einen konstanten Parameter eines Objekts aufrechtzuerhalten.
Ein Software-Automatiksystem ist so ausgelegt, dass es den Wert einer gesteuerten Größe gemäß einer zuvor bekannten Zeitfunktion ändert (obwohl es andere Parameter ändern kann).
Ein automatisches Verfolgungssystem ist so ausgelegt, dass es eine gesteuerte Größe entsprechend einer Änderung einer anderen Größe ändert, die am Eingang des Systems wirkt und deren Änderungsgesetz nicht im Voraus bekannt ist.
In Stabilisierungs-, Software- und Verfolgungssystemen besteht das Ziel der Steuerung darin, sicherzustellen, dass die gesteuerte Größe gleich oder nahe an ihrem vorbestimmten Wert ist, indem x (t) x x (t), genannt, beibehalten wird regulierung.
^
5. Die Prinzipien des Aufbaus von ATS (Grundlegende Managementprinzipien)
Das Prinzip der automatischen Regelung bestimmt, wie und auf welcher Grundlage eine Information eine Regelaktion gebildet wird. Eines der Hauptmerkmale, die das Prinzip der Regulierung charakterisieren, sind die Arbeitsinformationen, die für die Entwicklung des Wirkungsmanagements und die Struktur der Übertragungskette der Auswirkungen im System erforderlich sind.
^
5.1. Open-Loop-Prinzip
Das Prinzip besteht darin, dass der Steueralgorithmus nur auf der Grundlage des Funktionsalgorithmus entwickelt wird und nicht durch andere Störfaktoren oder Ausgangskoordinaten des Prozesses gesteuert wird. Das Funktionsdiagramm ist unten dargestellt.
Die Nähe von X und X ungefähr wird nur durch die Gestaltung und Auswahl der in den Elementen wirkenden physikalischen Gesetze sichergestellt. Trotz der offensichtlichen Mängel ist das Prinzip weit verbreitet. Elemente, die Teil eines offenen Stromkreises sind, sind Teil eines jeden Systems, daher scheint das Prinzip so einfach zu sein, dass es nicht immer als eines der Grundprinzipien herausgestellt wird. 
x 3 (t)
- legt den Funktionsalgorithmus fest.
Die Elemente des offenen Typs umfassen:
Logische Elemente und oder nicht Programmsensoren und der Programmmechanismus selbst, d.h. Anlasser und zum Beispiel programmierter Nockenmechanismus
^
5.2. Das Prinzip der Regelungsstörung (Kompensation)

Es besteht darin, dass aus den verschiedenen im System wirkenden Störungen eine Hauptsache ausgewählt wird, auf die der ATS reagiert. In diesem Fall wird der äußere Einfluss nur des Hauptstöreffekts auf den gesteuerten Parameter kompensiert und die Regelwirkung im System in Abhängigkeit von den Ergebnissen der Änderung der auf das Objekt einwirkenden Hauptstörung erzeugt.
Nachteile:
Die Anwendung ist auf Objekte beschränkt, deren Eigenschaften bekannt sind.
Da das System im Wesentlichen offen ist, treten Abweichungen der gesteuerten Größe mit einer Änderung der Eigenschaften des Objekts und der Elemente des Systems auf
Die Effekte, durch die Kompensationskanäle erzeugt werden, werden eliminiert.
^
5.3. Abweichungsregelungsprinzip (Polzuvov-Watt-Prinzip)

Vorteile:
1) Reduziert die Abweichung der Regelgröße unabhängig von den Faktoren, die diese Abweichung verursacht haben.
2) Im Vergleich zu offenen Systemen weniger empfindlich gegenüber Änderungen der Parameter von Systemelementen.
Nachteile:
1) In einfachen Einzelschleifensystemen kann keine absolute Inversion erreicht werden.
2) Es gibt ein Problem der Nachhaltigkeit.
Der Kontroll- (regulatorische) Effekt wird auf der Grundlage der Differenz zwischen den einstellbaren und den eingestellten Werten entwickelt. Die einzige Möglichkeit, eine bestimmte Verbindung herzustellen, wird als Hauptverbindung bezeichnet. Der einstellbare Parameter wird über die Hauptrückmeldung mit dem entgegengesetzten Vorzeichen in Bezug auf q (t) dem Eingang der Steuerung zugeführt. Daher wird die Hauptverbindung als negativ angesehen.
Ein negatives Merkmal eines geschlossenen Systems ist seine Vielseitigkeit. Jede Abweichung des einstellbaren Parameters vom eingestellten Wert führt unabhängig von Anzahl, Art und Ort der Anwendung von Störungen zum Auftreten einer Regelaktion.
In Systemen, die nach dem Prinzip der Abweichung arbeiten, ist ein Fehler erforderlich, um eine Steueraktion zu bilden. Dies ist an sich ein Nachteil, da es der Fehler ist, der vom Regler geändert werden muss. Wenn bei der Verwaltung komplexer Trägheitsobjekte die Steueraktion keine sofortige Änderung des gesteuerten Parameters verursachen kann, ist der möglicherweise auftretende Fehler unannehmbar groß.
^
5.4. Kombinierte Regulierung
Jedes der obigen Beispiele hat seine Vor- und Nachteile. Um hochpräzise automatische Systeme zu erstellen, wird normalerweise das Prinzip der kombinierten Regelung verwendet, wobei beide Prinzipien kombiniert werden. 
In einem kombinierten System wird der externe Einfluss durch die regulatorische Maßnahme entsprechend seiner Änderung kompensiert, und der Abweichungseffekt wird verwendet, um Fehler zu beseitigen, die sich aus der Ungenauigkeit der Regulierung ergeben.
^
5.5. Prinzip der Anpassung
Die Prinzipien der Anpassung (Anpassung) werden bei der selbstanpassenden ATS verwendet. Ihre Besonderheit ist, dass sie sich automatisch an veränderte Arbeitsbedingungen anpassen und automatisch das optimale Regelungsgesetz auswählen. Das zuvor betrachtete ATS mit der ständigen Anpassung des einstellbaren Parameters, bei dem der Regulierungsprozess auf die Beseitigung der Abweichung reduziert wird, kann den normalen Betrieb des Regulierungsobjekts nicht sicherstellen, wenn sich seine statischen und dynamischen Eigenschaften im Laufe der Zeit ändern. In solchen Fällen ist es notwendig, entweder die Reglereinstellungen oder die Eigenschaften und Parameter der einzelnen Elemente des Systems oder die Schaltung der Elemente zu ändern oder sogar neue Elemente einzuführen.
VORTRAG Nr. 2
Typische Eingangseinflüsse und Verbindungseigenschaften.
^
1. Auswirkungen und ihre Arten.
Wie oben erwähnt, finden das Steuersystem (Steuerung) und störende Aktionen statt, wodurch ein Übergangsprozess im System auftritt, der das System in einen neuen stationären Zustand führt. Unter realen Bedingungen können die Auswirkungen beliebig sein. Um die dynamischen Eigenschaften von Elementen und Systemen zu untersuchen, werden solche typischen Effekte ausgewählt, die nach Möglichkeit die wichtigsten Merkmale realer Effekte genau widerspiegeln. Diese Effekte können entweder sein höchstwahrscheinlichoder die meisten nebenwirkungen. Darüber hinaus können sie in reguläre und zufällige, kontinuierliche und diskrete unterteilt werden.

Für die Analyse wurden typische Einflüsse ausgewählt, die die Merkmale der ausgewählten Links am vollständigsten und anschaulichsten zeigen. Standardmäßig werden schrittweise, harmonische und linear ansteigende Schritte akzeptiert.
Ein einzelner Sprung kann auftreten, wenn das Netzwerk sofort geschlossen oder getrennt wird. gleichstromverursacht durch Anwendung oder Lastabwurf.
Einzelschrittbelichtung
 .
.
Einzelimpulsaufprall
 so dass
so dass  .
.
Der harmonische Einfluss ist eine Funktion, die je nach Sinus- oder Cosinusgesetz variiert. Es wird zur Analyse der dynamischen Eigenschaften von ATS mit Frequenzmethoden verwendet. Die Frequenzmethode besteht darin, Frequenzeigenschaften zu erstellen.
x(t) = 1 (t) x m Sünde wt.
Für Tracking- und Softwaresysteme ist eine lineare Belichtung typisch
x(t) = 1 (t) a t.
Die Modi des Übergangs von selbstfahrenden Kanonen von einem Zustand in einen anderen sind in der Abbildung dargestellt.

^
2. Zeitliche Eigenschaften
Eine visuelle Darstellung der Eigenschaften eines Links wird durch eine Funktion gegeben, die eine Lösung für eine Differentialgleichung darstellt. Dieselbe Differentialgleichung kann jedoch viele Lösungen haben, deren spezifische Form von den Anfangsbedingungen und der Art der Funktion abhängt, die den Effekt definiert. Daher ist es üblich, die dynamischen Eigenschaften von Systemelementen mit einer Lösung zu charakterisieren, die Null-Anfangsbedingungen und einem der oben betrachteten typischen Effekte entspricht. Die visuellste Darstellung der dynamischen Eigenschaften eines Elements ergibt sich aus seiner Übergangscharakteristik.
Die Übergangscharakteristik h (t) wird als Änderung der Ausgangsgröße bezeichnet, die auftritt, nachdem auf den Eingang eine abrupte Änderung der Eingangsgröße bei Null-Anfangsbedingungen angewendet wird.
^ Die Impulsübergangscharakteristik w (t) ist die Änderung der Ausgangsgröße, die auftritt, nachdem die Delta-Funktion bei Null-Anfangsbedingungen eingegeben wurde.
Das Einschwingverhalten ist gleich der Ableitung des Einschwingverhaltens
w(t) = dh(t)/ dt,
Umgekehrt ist das Einschwingverhalten gleich dem Integral des Einschwingverhaltens des Impulses.

Vorübergehende Eigenschaften und werden auch als temporär bezeichnet.
^
3. Frequenzgang
Frequenzcharakteristiken werden Abhängigkeiten genannt, die die Eingangs- und Ausgangsgrößen eines linearen Systems in einem stationären Zustand verbinden, wenn sich die Eingangswirkung gemäß dem Oberschwingungsgesetz x (t) \u003d a sin wt mit Frequenz und konstanter Amplitude a ändert. Am Ausgang des Systems werden nach Abschluss des Übergangsprozesses sinusförmige Schwingungen y (t) \u003d b sin (wt + j) hergestellt. In der komplexen Ebene werden die Eingangs- und Ausgangsgrößen für jeden Zeitpunkt t durch die Vektoren a und b bestimmt.

In komplexer trigonometrischer Form
X \u003d a (cos wt + j sin wt)
Y \u003d b.
Unter Verwendung der Euler-Formel e jwt \u003d cos wt + j sin wt erhalten wir
X (t) \u003d ae jwt; y (t) \u003d sei j (wt + j).

Wenn die Schwingungsamplitude der Eingangsgröße unverändert bleibt und die Frequenz w von Null auf ¥ geändert wird, entspricht jeder Wert der Frequenz bestimmten Werten der Schwingungsamplitude b und der Phasenverschiebung j am Ausgang des Systems. Dies bedeutet, dass das Verhältnis der Amplituden und der Phasendifferenz Funktionen der Frequenz sind, d.h.
B / a \u003d A (w); j \u003d j (w).
Die oben diskutierten Zeit-, Übertragungs- und Frequenzcharakteristiken sind durch die direkten und inversen Laplace- und Fourier-Transformationen eindeutig mit Honig verbunden. Dies ist in der Tabelle gezeigt.
Tabelle.
Gegenseitige Entsprechung dynamischer Eigenschaften.
| Charaktere | h (t) | w (t) | W (p) | W (jw) |
| Übergang h (t) \u003d |
| L. -1
(W (p) / p) | F. -1
(W (jw) / jw}
|
|
| Impuls w (t) \u003d | dh (t) / dt | L. -1
(W (p)) | F. -1
(W (jw)}
|
|
| Ausrüstung W (p) \u003d | pL (h (t)) | L (w (t)) | W (jw)
½ p \u003d j w |
|
| Frequenz W (jw)=
| jwF (h (t)) | F (w (t)) | W (p)½ p \u003d j w |

4. Typische Verbindungen von Elementen und ihre Eigenschaften

Die algorithmische Struktur von selbstfahrenden Kanonen ist eine Kombination aus drei typischen Verbindungseinheiten. sequentiell, parallel und gegenparallel (Rückkopplungsabdeckung), wie in der Abbildung gezeigt.
Eine serielle Verbindung ist eine solche Verbindung, bei der der Ausgabewert jedes vorherigen Elements der Eingang für das nächste Element ist. Da für jedes i-te Element der statischen Gleichung,
y ich = k ich y ich -1 , ()
Dann der Gesamtübertragungskoeffizient der in Reihe geschalteten Verbindungen ist gleich dem Produkt ihrer Übersetzungsverhältnisse

 . ()
. ()
Entsprechend äquivalente Übertragungsfunktion serielle Verbindung von n Links ist gleich dem Produkt von n Übertragungsfunktionen von Links
 . ()
. ()
Eine Parallelverbindung wird als solche Verbindung bezeichnet, bei der die Eingabe aller Verbindungen den gleichen Effekt erhält und ihre Ausgabewerte summiert werden. Nach dieser Definition
x \u003d x 1 \u003d ... \u003d x ich \u003d ... \u003d x n , ()
y \u003d y 1 + ... + y ich + ... + y n , ()
y ich \u003d k ich x ich , ()
dann das Gesamtübersetzungsverhältnis der parallel geschalteten Verbindungen ist gleich der Summe ihrer Übersetzungsverhältnisse
 . ()
. ()
Entsprechend äquivalente Übertragungsfunktion parallelschaltung von n Verbindungen ist gleich der Summe von n Übertragungsfunktionen von Verbindungen
 . ()
. ()
Eine gegenparallele Verbindung zweier Verbindungen (Rückkopplungsverbindung) wird eine solche Verbindung genannt, bei der das Ausgangssignal der ersten Verbindung dem Eingang der zweiten zugeführt wird und das Ausgangssignal des zweiten Elements mit dem gemeinsamen Eingangssignal summiert wird. Die erste Verbindung wird als direkte Verbindung bezeichnet, und das zweite Element wird als Rückkopplungsverbindung bezeichnet. Abhängig vom Vorzeichen des Rückkopplungssignals werden positive und negative Rückkopplungen unterschieden. Entsprechend der Definition von Feedback können Sie die folgenden Gleichungen schreiben:
Direkte Verbindung
y P. = k P. x P. , ()
Feedback
y o.s. = k o.s. y, ()
Und der Summationsknoten
 . ()
. ()
Durch Einsetzen erhalten wir die Gleichung der statischen Verbindung mit Rückkopplung
 . ()
. ()
Von hier bekommen wir
 . ()
. ()
der Gesamtübertragungskoeffizient der Rückkopplungsverbindung ist gleich dem direkten Kettenkoeffizienten geteilt durch eins plus dem Produkt aus den direkten und Rückkopplungskoeffizienten.
Darüber hinaus entspricht das Vorzeichen „+“ einer negativen Rückkopplung und das Vorzeichen „-“ einer positiven Rückkopplung.
Dementsprechend ist die äquivalente Übertragungsfunktion der Rückkopplungsverbindung
 ()
()
Wobei das Vorzeichen "+" einer negativen Rückkopplung und das Vorzeichen "-" einer positiven Rückkopplung entspricht.
VORTRAG Nr. 3
TYPISCHE LINKS UND IHRE EIGENSCHAFTEN
- ^
Allgemeine Beschreibungen und Eigenschaften
a 0 y "" (t) + a 1 y " (t) + a 2 y (t) \u003d b 0 x " (t) + b 1 x (t). (1)
Es ist üblich, die Gleichung eines Links zu einer Standardform in symbolischer Notation zu bringen:
Wo T. 2 2 =a 0 /a 2 ; T. 1 = a 1 /a 2 ; t =b 0 /b 1 - Zeitkonstanten; k = b 1 /a 2 .
Erinnern Sie sich daran, wie Sie die Eigenschaften der Links erhalten können:
Statisch, Zeitableitungen gleich Null,
Dynamisch: ....
W (p) \u003d R (p) / Q (p) \u003d k (tp + 1) / (T. 2 2 p 2 + T. 1 p +1) , (2)
Um eine Einschwingreaktion zu erhalten h (t)auf der Suche nach einer allgemeinen Lösung, bestehend aus zwei Teilen. Die Impulsantwort ist die zeitliche Ableitung der Einschwingantwort w (t) \u003d dh (t) / dt.
Aus der allgemeinen Form der Gleichung oder Übertragungsfunktion können einige Schlussfolgerungen über die Eigenschaften der Verknüpfungen gezogen werden. Wenn die Chancen a 2 und b 1 ungleich Null sind, werden solche Verknüpfungen als statisch oder positionell bezeichnet, was auf das Vorhandensein von hinweist statische Gleichungen. Andernfalls sind die Verbindungen astatisch n-ter Ordnung, wobei n der Grad des Differenzierungsoperators ist, der den Astatismus der Verbindung oder des Systems charakterisiert.
Eine Reihe von Verbindungen wird als elementar bezeichnet, nämlich Trägheit, ideale Differenzierung und ideale Integration.
Form
^
2. Übersicht und Beispiele
Tabelle 3.1

Tabelle 3.2 Zeitliche Eigenschaften von Positionsverbindungen





Tabelle 3.6
Zeitliche Merkmale differenzierender Verknüpfungen



^
3. Verknüpfen Sie Anwendungen



VORTRAG Nr. 4
^
NACHHALTIGKEIT VON STEUERSYSTEMEN
4.1. Das Konzept, die Typen und der allgemeine Stabilitätszustand
Eine der wichtigsten Eigenschaften eines automatischen Steuerungssystems neben der Genauigkeit ist die Stabilität. Wenn die Genauigkeitsindikatoren den Grad der Nützlichkeit und Wirksamkeit des Systems bestimmen, hängt die Funktionsfähigkeit des Systems von der Stabilität ab. Daher ist das Problem der Stabilität von Systemen eines der zentralen in der Theorie der automatischen Steuerung.
Wir werden die physikalische Bedeutung des Konzepts der „Stabilität“ offenbaren. Die Stabilität eines automatischen Systems ist die Eigenschaft eines Systems, nach Beendigung der Exposition, die das System aus diesem Zustand gebracht hat, in seinen ursprünglichen Gleichgewichtszustand zurückzukehren. Ein instabiles System kehrt nicht in seinen ursprünglichen Zustand zurück, sondern bewegt sich kontinuierlich von ihm weg.
Die Instabilität von automatischen Steuerungssystemen entsteht in der Regel durch falsche oder sehr starke Wirkung der Hauptrückmeldung. Die falsche Aktion der Hauptrückmeldung tritt normalerweise in den Fällen auf, in denen aufgrund eines Fehlers während der Installation des Systems die Verbindung positiv (statt negativ) ist, wodurch das System für fast alle Parameter instabil wird. Entstehen aus instabilität wird als statisch bezeichnet .
Eine komplexere und häufigere Art von Instabilität ist die dynamische Instabilität. Es manifestiert sich in Systemen mit negativer Rückkopplung, mit einem ausreichend großen Wert des Übertragungskoeffizienten der offenen Schleife und mit einer Anzahl von Trägheitsverbindungen von nicht weniger als drei. Der Grund für die dynamische Instabilität ist normalerweise eine signifikante Trägheit der Elemente des geschlossenen Regelkreises, weshalb das Hauptrückkopplungssignal im Oszillationsmodus des Systems signifikant hinter dem Eingangssignal liegt und mit diesem in Phase ist. Dies bedeutet, dass eine Verbindung, die konstruktiv als negativ (im statischen Modus!) Hergestellt wurde, in der Dynamik (im Modus der harmonischen Schwingungen) bei einer bestimmten Frequenz als positiv erscheint.
Betrachten Sie das mathematische Wesen von Stabilität und Instabilität. Gemäß der oben angegebenen physikalischen Definition hängt die Stabilität nur von der Art der freien Bewegung des Systems ab. Die freie Bewegung eines linearen oder linearisierten Systems wird durch eine homogene Differentialgleichung beschrieben
a 0 x (n ) (t)+ a n -1 x (n -1 ) (t)+…+ a n -1 x¢ (t)+ a n x (t)= 0. (4.1)
Wo x (t) = x c (t) - die freie Komponente des Ausgabewerts des Systems.
Die erzwungene Komponente der Ausgangsgröße, die von der Art der äußeren Einwirkung und der rechten Seite der Differentialgleichung abhängt, hat keinen Einfluss auf die Stabilität des Systems.
Wir geben eine mathematische Definition des Begriffs „Stabilität“. Ein System ist stabil, wenn die freie Komponente x c (t) der Übergang tendiert mit der Zeit gegen Null wenn
 , (4.2)
, (4.2)
A. wenn die freie Komponente unbegrenzt ansteigt wenn
 , (4.3)
, (4.3)
Dann das System ist instabil . Wenn schließlich die freie Komponente weder gegen Null noch gegen Unendlich tendiert, dann das System befindet sich an der Grenze der Stabilität .
In diesem Fall tendiert der Ausgabewert des Systems offensichtlich zu der erzwungenen Komponente, die durch die externe Aktion und die rechte Seite der Gleichung bestimmt wird. Diese Stabilität heißt asymptotisch .
Wir finden die allgemeine Bedingung, unter der das durch Gleichung (8.1) beschriebene System stabil ist. Die Lösung der Gleichung ist gleich der Summe
 , (4.4)
, (4.4)
Wo C. k - Konstanten in Abhängigkeit von den Anfangsbedingungen; p k - wurzeln der charakteristischen Gleichung
a 0 p n + a n-1 p n-1 + ... + a n-1 p + a n = 0. (4.5)
Die Wurzeln der charakteristischen Gleichung können real sein (p k = a k) imaginär (p k = jb k) und integriert p k = a k + jb k , darüber hinaus sind komplexe Wurzeln immer untereinander konjugiert: Wenn es eine Wurzel mit einem positiven Imaginärteil gibt, muss es eine Wurzel mit demselben Modulo, aber negativem Imaginärteil geben.
Die Übergangskomponente (8.4) für t ® ¥ neigt nur dann zu Null, wenn jeder Term des Formulars Mit k e a kt ® 0. Die Art dieser Zeitfunktion hängt von der Art der Wurzel ab. p k . Berücksichtigen Sie alle möglichen Fälle der Lage der Wurzeln p k auf der komplexen Ebene (Abb. 8.1) und den entsprechenden Funktionen x k ( t), die innerhalb der Kreise angezeigt werden (wie auf dem Oszilloskopbildschirm).

Abb. 4.1. Der Einfluss der Wurzeln der charakteristischen Gleichung des Systems auf die Komponenten seiner freien Bewegung
1. Zu jeder gültigen Wurzel p k =
a k in Lösung (8.4) entspricht einem Term der Form
x k ( t) = Mit k e a kt. (4.6)
Wenn a k< 0 (корень p 1 ), dann Funktion (8.6) für t®¥ neigt zu Null. Wenn a k\u003e 0 (Wurzel p 3 ), dann erhöht sich die Funktion auf unbestimmte Zeit. Wenn a k = 0 (Wurzel p 2 ), dann bleibt diese Funktion konstant.
2. Zu jedem Paar konjugierter komplexer Wurzeln p k = a k + jb k und p k = a k - jb k In Lösung (8.4) entsprechen zwei Terme, die zu einem Term kombiniert werden können
x k ( t) = Mit k e a kt sin ( b k t + j k). (4.7)
Funktion (8.7) ist eine Sinuskurve mit einer Frequenz b k und amplituda, die sich zeitlich exponentiell ändern. Ist der Realteil zweier komplexer Wurzeln a k (siehe Abb. 4.1, Wurzeln p 4 und p 5 ) dann zerfällt die Schwingungskomponente (8.7). Wenn a k\u003e 0 (Wurzeln p 8 und p 9 ), dann nimmt die Amplitude der Schwingungen unbegrenzt zu. Zum Schluss, wenn a k \u003d\u003d 0 (Wurzeln p 6 und p 7), wenn beide konjugierten Wurzeln imaginär sind ( p k = jb k , p k = - jb k) dann x k ( t) ist eine ungedämpfte Sinuskurve mit einer Frequenz b k.
Wenn unter den Wurzeln der charakteristischen Gleichung (4.5) gibt es l gleiche Wurzeln p l , dann in Lösung (8.4) statt l Begriffe des Typs Mit k e a kt eine Komponente wird angezeigt
(C. 0 +
C. 1
t +
C. 2 t
2 +…+
a l -1
t l -1
)  =
0. (4.8)
=
0. (4.8)
Vorausgesetzt, dass eine Funktion der Form e - bt für jedes b nimmt schneller ab als die Formzunahme t r , Es kann bewiesen werden, dass bei einer Vielzahl von Wurzeln die Lösung (4.4) nur dann gegen Null tendiert, wenn der Realteil der mehreren Wurzeln negativ ist p l .
Basierend auf der Analyse können wir das Allgemeine formulieren stabilitätsbedingung:
für die Stabilität eines linearen automatischen Steuerungssystems ist es notwendig und ausreichend, dass die Realteile aller Wurzeln der charakteristischen Gleichung des Systems negativ sind.
Wenn mindestens eine Wurzel einen positiven Realteil hat, ist das System instabil. Die Stabilität des Systems hängt nur von der Art der Wurzeln der charakteristischen Gleichung ab und nicht von der Art der äußeren Einflüsse auf das System. Stabilität ist eine interne Eigenschaft des Systems, die ihm unabhängig von den äußeren Bedingungen inhärent ist.
Unter Verwendung der geometrischen Darstellung der Wurzeln auf der komplexen Ebene (siehe Abb. 4.1) in Form von Vektoren oder Punkten können wir die zweite Formulierung der allgemeinen Stabilitätsbedingung (äquivalent zur Hauptbedingung) geben:
für die Stabilität eines linearen Systems ist es notwendig und ausreichend, dass alle Wurzeln der charakteristischen Gleichung in der linken Halbebene liegen.
Imaginäre Achse jb ist die Stabilitätsgrenze in der Wurzelebene. Wenn die charakteristische Gleichung ein Paar rein imaginärer Wurzeln hat (p k = +jb p k + i \u003d - jb k) und alle anderen Wurzeln liegen in der linken Halbebene, dann ungedämpfte harmonische Schwingungen mit einer Kreisfrequenz w \u003d | b k | In diesem Fall heißt es, dass das System eingeschaltet ist schwingungsstabilitätsgrenze .
Der Punkt b \u003d 0 auf der imaginären Achse entspricht der sogenannten Nullwurzel. Wenn die Gleichung eine Nullwurzel hat, ist das System eingeschaltet aperiodische Stabilitätsgrenze . Wenn es zwei solche Wurzeln gibt, ist das System instabil.
Es darf nicht vergessen werden, dass die linearen Gleichungen realer Systeme vom Typ (4.1) in der Regel durch Vereinfachung und Linearisierung der anfänglichen nichtlinearen Gleichungen erhalten werden. Es stellt sich die Frage: Inwieweit ist die Stabilitätsschätzung durch die linearisierte Gleichung für ein reales System gültig? Werden die durch Linearisierung verworfenen Zerlegungsterme einen signifikanten Einfluss auf die Analyse haben? Die Antwort gab der russische Mathematiker A. M. Lyapunov 1892 in seiner Arbeit „Das allgemeine Problem der Bewegungsstabilität“. Er formulierte und bewies den folgenden Satz: Wenn die charakteristische Gleichung eines linearisierten Systems mindestens eine Nullwurzel oder ein Paar imaginärer Wurzeln hat, ist es unmöglich, die Stabilität eines realen Systems durch eine linearisierte Gleichung zu beurteilen. Zur Beurteilung der Stabilität eines linearen Systems reicht es daher aus, nur die Vorzeichen der Realteile der Wurzeln der charakteristischen Gleichung zu bestimmen.
In der Theorie der automatischen Steuerung wurde eine Reihe von Regeln entwickelt, mit denen Sie die Vorzeichen der Wurzeln beurteilen können, ohne die charakteristische Gleichung zu lösen und die numerischen Werte der Wurzeln selbst nicht zu finden. Diese Regeln werden aufgerufen nachhaltigkeitskriterien .
Stabilitätskriterien können algebraisch und häufig sein. Algebraische Kriterien die notwendigen und ausreichenden Bedingungen für die Negativität der Wurzeln in Form von Beschränkungen festlegen, die bestimmten Koeffizientenkombinationen der charakteristischen Gleichung auferlegt werden. Frequenzkriterien bestimmen Sie die Beziehung zwischen der Stabilität des Systems und der Form der Frequenzeigenschaften des Systems.
Bei der Analyse der Stabilität von Steuerungssystemen lösen sie normalerweise ein oder mehrere Probleme:
bewerten, ob das System bei bestimmten Parametern stabil ist oder nicht;
Bestimmen Sie den Variationsbereich einiger nicht eingestellte Parameter Systeme;
^
4.2. Algebraische Stabilitätskriterien
Das einfachste Kriterium für Nachhaltigkeit ist bedingung für die Positivität der Koeffizienten der charakteristischen Gleichung . Die Positivität der Koeffizienten von Gleichung (8.4) ist eine notwendige (aber nicht ausreichende!) Bedingung für die Stabilität des Systems. Dies bedeutet, dass das System stabil oder instabil sein kann, wenn alle Koeffizienten positiv sind. Wenn jedoch mindestens ein Koeffizient der Gleichung negativ oder gleich Null ist, ist das System instabil.
Die häufigsten Kriterien in der Ingenieurpraxis sind Hurwitz und Routh.
^ Hurwitz-Kriterium Es wurde 1895 vom deutschen Mathematiker A. Hurwitz formuliert und bewiesen, der sein Kriterium durch die Lösung eines rein mathematischen Problems entwickelte - das Problem der Untersuchung der Stabilität von Lösungen einer linearen Differentialgleichung. In Bezug auf die Probleme der Steuerungstheorie kann das Hurwitz-Kriterium wie folgt formuliert werden:
automatisches System, beschrieben durch die charakteristische Gleichung 8.5 stabil, wenn für a 0 > 0 Alle Determinanten sind positiv D. ich art von

(4.9)
(Wie ist die Determinante der Matrix? i * i ).
Wenn mindestens eine der Determinanten (4.9), die als Hurwitz-Determinanten bezeichnet wird, negativ ist, ist das System instabil.
Da die letzte Spalte der Hauptdeterminante D n immer nur ein Element enthält a n ungleich Null, dann nach der bekannten Eigenschaft der Determinanten D n \u003d a n D n -1.
Wenn die Hauptdeterminante D n \u003d\u003d 0 und alle anderen Determinanten positiv sind, dann das System ist eingeschaltet stabilitätsgrenze . Mit dem Ausdruck (4.12) teilt sich diese Bedingung in zwei Teile: a n = 0 und D n -1 \u003d 0.
Zustand aber n . \u003d 0 entspricht einer Nullwurzel, d.h. aperiodische Stabilitätsgrenze und die Bedingung D n -1 \u003d 0 ist ein Paar imaginäre Wurzeln, d.h. schwingungsstabilitätsgrenze .
Das Hurwitz-Kriterium sollte verwendet werden, um die Stabilität von Systemen nicht höher als fünfter Ordnung zu analysieren. Bei n \u003e 5 Die Berechnung von Determinanten wird umständlich.
^ Routh Kriterium1877 vom englischen Mathematiker E.J. Routh vorgeschlagen, ist es ratsam, bei der Analyse der Stabilität von Systemen über der vierten Ordnung zu verwenden. Dazu bilden aus den Koeffizienten der charakteristischen Gleichung (4.5) die Tabelle (Tabelle. 4.1) in der ersten Zeile ( ich \u003d 1) die die Koeffizienten der Gleichung mit geraden Indizes in der Sekunde enthält ( ich \u003d 2) - mit ungeraden Indizes in den folgenden Zeilen ( ich \u003e 3) Man erhält die Routh-Koeffizienten, die als Kombinationen der Koeffizienten zweier höherer Reihen gemäß der Formel erhalten werden
r ik \u003d r i -2, k + 1 - ( r i - 2, 1 r i -1, k + 1 / r i -1, 1), (4.10)
Wo ich - Zeilennummer, k ist die Spaltennummer. Das Kriterium selbst ist wie folgt formuliert: das automatische System ist stabil, wenn. Alle Koeffizienten der ersten Spalte der Routh-Tabelle sind positiv (einschließlich a 0 und a 1 ).
Tabelle 4.1Routh Odds

Wenn nicht alle Spaltenkoeffizienten positiv sind, ist das System instabil. Darüber hinaus entspricht die Anzahl der Vorzeichenwechsel zwischen diesen Koeffizienten der Anzahl der rechten Wurzeln der charakteristischen Gleichung. Der Koe(4.10) ist einfach zu programmieren, daher wird das Routh-Kriterium zur Analyse von Systemen höherer Ordnung verwendet ( n \u003e 5) mit einem Computer.
Ein Vorteil der Hurwitz- und Routh-Kriterien besteht darin, dass sie zur Bewertung der Stabilität sowohl geschlossener als auch offener Systeme verwendet werden können. Die Schlussfolgerung zur Stabilität bei Anwendung dieser Kriterien wird in Bezug auf das System (geschlossen oder offen) gezogen, dessen Gleichung analysiert wird.
Der Nachteil ist die geringe Sichtbarkeit.
^
8.3. Mikhailov Kriterien
Das Mikhailov-Kriterium gehört zur Gruppe der Frequenzstabilitätskriterien. Es wurde 1936 vom sowjetischen Wissenschaftler A. V. Mikhailov in der Arbeit „Harmonische Methode in der Steuerungstheorie“ formuliert und begründet, die hoch geschätzt wurde und als Beginn des weit verbreiteten Einsatzes von Frequenzmethoden in der Theorie der automatischen Steuerung diente.
Mikhailovs Kriterium basiert ebenso wie das Hurwitz- und das Routh-Kriterium auf der Analyse der charakteristischen Gleichung des Systems und kann daher zur Beurteilung der Stabilität geschlossener und offener Systeme verwendet werden.
Die linke Seite der charakteristischen Gleichung, das charakteristische Polynom genannt, habe die Form
F (p) \u003d a 0 p n + a n-1 p n-1 + ... + a n-1 p + a n (4.11)
Wir ersetzen die rein imaginäre Wurzel in diesem Polynom anstelle der Variablen p, die wir im Folgenden bezeichnen werden jw. Dann erhalten wir die Funktion einer komplexen Variablen
F.(jw ) \u003d a 0 (jw ) n + a n-1 (jw ) n-1 + ... + a n-1 jw + a n, (4.12)
Was auf die gleiche Weise dargestellt werden kann wie die Amplituden-Phasen-Charakteristik als die Summe der Real- und Imaginärteile:
F.(jw ) = P.(w ) + jQ(w ). (4.13)
Der eigentliche Teil P.(w ) enthält nur gerade Grade der Variablen w:
P.(w ) = a n - a n - 2 w 2 + a n - 4 w 4 -. . . , (4.14)
Und der Imaginärteil Q.(w ) - nur ungerade:
Q.(w ) = a n -1 w - a n - 3 w 3+ a n - 5 w 5 -. . . . (4.15)
Jeder feste Wert der Variablen w entspricht einer komplexen Zahl, die als Vektor auf der komplexen Ebene dargestellt werden kann. Wenn wir jetzt den Parameter w von 0 auf ¥ ändern, dann das Ende des Vektors F.(jw ) wird eine Linie beschreiben (Abb. 4.2, a), die als Kennlinie oder Mikhailovs Hodograph bezeichnet wird. Anhand dieser Kurve kann man die Stabilität des Systems beurteilen.
Der Wortlaut des Mikhailov-Kriteriums:
das durch eine Gleichung n-ter Ordnung beschriebene automatische Steuersystem ist stabil, wenn w von 0 bis ¥ Der charakteristische Vektor des Systems F (jw) dreht sich um einen Winkel n p / 2 gegen den Uhrzeigersinn, ohne zu verschwinden.
Dies bedeutet, dass die Kennlinie eines stabilen Systems nacheinander durch w von 0 bis ¥ verlaufen muss n Quadranten. Aus den Ausdrücken (4.14) und (4.15) folgt die Kurve F (jw ) beginnt immer an einem Punkt auf der realen Achse, entfernt vom Ursprung durch aber n
Kennlinien für stabile Systeme (Abb. 4.2, b) haben eine glatte Spiralform und gehen im Quadranten, dessen Anzahl gleich der Reihenfolge der Gleichung ist, ins Unendliche. Wenn die Kennlinie vergeht n Quadranten sind nicht sequentiell oder es passieren weniger Quadranten, das System ist instabil (Abb. 4.2, c). 
Abb. 4.2. Charakteristische Kurven (Hodographen) von Mikhailov
Wenn die Kurve F.(jw )
durchläuft den Ursprung, dann befindet sich das System an der Grenze der Stabilität. In der Tat, wenn die charakteristische Gleichung eine Nullwurzel hat p k \u003d 0 (aperiodische Stabilitätsgrenze) oder ein Paar rein imaginärer Wurzeln p k =
± jb k (Schwingungsstabilitätsgrenze), dann die Funktion F.(jw )
für w \u003d 0 oder w \u003d b k wird verschwinden.
In praktischen Berechnungen ist es bequem zu verwenden folge von Mikhailovs Kriterium: das System ist stabil, wenn der Real- und Imaginärteil der charakteristischen Funktion F (jw) abwechselnd verschwinden (Abb. 8.2, d), d. h. wenn die Wurzeln der Gleichungen P (w) \u003d 0 und Q (w) \u003d 0 sind eingestreut.
Dies folgt direkt aus der Formulierung des Mikhailov-Kriteriums - aus der Bedingung des sukzessiven Durchgangs der Kurve F.(jw ) durch n Quadranten.
Das Mikhailov-Kriterium wird zweckmäßigerweise verwendet, um die Stabilität von Systemen höherer Ordnung zu analysieren (n > 5).
^
4.4. Nyquist-Kriterien
Das Kriterium wurde 1932 vom amerikanischen Physiker X. Nyquist formuliert und von A. Mikhailov begründet und auf die Analyse automatischer Steuerungssysteme angewendet.
Das Nyquist-Kriterium ermöglicht es uns, die Stabilität des Systems anhand der Amplituden-Phasen-Charakteristik der offenen Schleife des Systems zu beurteilen. Dies ist ein wesentlicher Vorteil des Kriteriums, da der Aufbau der Amplituden-Phasen-Charakteristik des offenen Stromkreises für die meisten realen Systeme einfacher ist als der Aufbau des Mikhailov-Hodographen. Diese Konstruktion ist insbesondere für Einkreissysteme vereinfacht, die aus typischen Verbindungen bestehen. Und in diesen Fällen, wenn ist unbekannt Die mathematische Beschreibung mehrerer Strukturelemente des Systems und die Bewertung ihrer Eigenschaften ist nur durch experimentelle Bestimmung der Frequenzeigenschaften möglich. Das Nyquist-Kriterium ist das einzig geeignete.
Die Hauptformulierung des Ny-Quist-Kriteriums:
das automatische Steuersystem ist stabil, wenn die Amplitudenphasenkennlinie W (jw) des offenen Regelkreises den Punkt nicht mit Koordinaten (-1; j0) abdeckt.
Diese Formulierung gilt für Systeme, die im geöffneten Zustand stabil sind. Dies sind die meisten realen Systeme, die aus stabilen Elementen bestehen.
In Abb. In 4.3 zeigt a die Amplituden-Phasen-Eigenschaften der offenen Schleife, die drei verschiedenen Fällen entsprechen: Das System ist stabil (Kurve 1); das System befindet sich an der Schwingungsgrenze der Stabilität (Kurve 2); Das System ist instabil (Kurve 3).
Das Nyquist-Kriterium kann physikalisch wie folgt interpretiert werden. Angenommen, am Eingang des Systems wirkt ein harmonisches Signal (Abb. 4.3, b). g (t)
== g m sin w t niedrige Amplitude g m. Die Frequenz w sei gleich der Frequenz w p, bei der die Phasenverschiebung j ( jw) erstellt durch den Link W.(jw) ist gleich - p. Dann ist das negative Rückkopplungssignal mit dem Signal in Phase g (t) und die Momentanwerte der Signale werden addiert. 

Abb. 4.3. Die Amplitudenphaseneigenschaften der offenen Schleife (a) und die physikalische Interpretation (b) des Nyquist-Kriteriums
Bei einer Frequenz w \u003d w p ist das Modul | W. (jw) | \u003d 1 (es gibt keine Verstärkung und keine Unterdrückung), dann behält die Systemschleife auch nach dem Verschwinden des externen Effekts ungedämpfte Schwingungen bei g (t) Das heißt, das System wird an der Grenze der Stabilität stehen. Funktion W.(jw) geht durch den Punkt (-1; j0). Wenn bei einer Frequenz w \u003d w p das Modul | W.(jw) |< 1 (подавление есть), то после исчез-новения внешнего воздействия колебания в контуре затухнут, т. е. система устойчива, характеристика не охватывает точку (-1; j0). Wenn das Modul | W.(jw) | \u003e 1 (es gibt eine Verstärkung), dann nimmt die Amplitude der Signale in der Schaltung unbegrenzt zu, dh das System ist instabil. Funktion W. (jw) in diesem Fall deckt es den Punkt (-1; j0).
Somit ist die besondere Rolle des Punktes (-1; j0) liegt in der Tatsache, dass es zum einen der Umwandlung von negativer Rückkopplung in positive entspricht und zum anderen die Grenze zwischen der Verstärkung und Dämpfung von Signalen durch eine Verbindung ist W. (jw).
^
Vorlesung 5 . Typische Gesetze der Regulierung und Präzision sau
5.1. Typische ACS-Steuerungsalgorithmen
Betrachten Sie typische Steueralgorithmen (Steuergesetze), die in linearen automatischen Systemen verwendet werden.
1. Das einfachste Regelungsgesetz wird unter Verwendung der Trägheitsverbindung mit der Übertragungsfunktion umgesetzt
W. p (p) \u003d y (p) /e(p) \u003d k n \u003d k p. (5.1)
Nach diesem Ausdruck ist die Steuerwirkung sowohl in der Statik als auch in der Dynamik proportional zum Fehlersignal e. Daher wird ein solches Regelungsgesetz genannt proportional (P).
Die Vorteile des P-Controllers sind Einfachheit und Geschwindigkeit, die Nachteile sind begrenzte Genauigkeit (insbesondere bei der Verwaltung von Objekten mit hoher Trägheit und Verzögerung).
2. Das Gesetz der Regulierung, das der Übertragungsfunktion entspricht
W. p (p)= k und / oder p = k p / T. und p (5.2)
Angerufen integral (Und). Mit dem integralen Gesetz der Regulierung wird die Kontrollaktion bei zu jedem Zeitpunkt proportional zum Integral des Fehlersignals e. Daher reagiert der I-Regler hauptsächlich auf langfristige Abweichungen des geregelten Wertes vom eingestellten Wert. Kurzfristige Abweichungen werden durch einen solchen Regler ausgeglichen.
Die Vorteile des Integralgesetzes sind die besten (Genauigkeit im stationären Modus, die Nachteile sind die schlechtesten Eigenschaften im transienten Modus (niedrigere Geschwindigkeit und größere Schwingung).
3. Die größte Verbreitung in der industriellen Automatisierung wurde erhalten proportional-Integral (PI) Regulierungsgesetz
W. p (p)= k n + k und / oder p = k p + k p / T. und p = k p (T. und p + 1)/T. und p. (5.3)
Aufgrund des Vorhandenseins einer integralen Komponente bietet das PI-Regelungsgesetz eine hohe Genauigkeit im stationären Modus und mit einem bestimmten Koeffizientenverhältnis k n und k und bietet eine gute Leistung unter Übergangsbedingungen.
4. Die beste Leistung wird erzielt, wenn proportionaldifferential (PD) Regulierungsgesetz
W. p (p)= k n + k d p = k p + k p T. d p. (5.4)
Der PD-Controller reagiert nicht nur auf die Größe des Fehlersignals, sondern auch auf seine Änderungsrate. Dadurch wird während der Steuerung eine vorbeugende Wirkung erzielt. Der Nachteil des Proportional-Differential-Regelungsgesetzes ist die begrenzte Genauigkeit.
5. Das flexibelste Regelungsgesetz (in der Klasse der linearen Gesetze) ist proportional-Integral-Differential (PID) Gesetz
W. p (p)= k n + k und / oder p + k d p = k p (T. und p + 1 + T. und T. d p 2 )/T. und p, (5.5)
Was die Vorteile einfacherer Gesetze kombiniert.
Koeffizienten und Zeitkonstanten, die in den Übertragungsfunktionen typischer Steuerungen enthalten sind, werden aufgerufen tuning-Parameter und haben die folgenden Namen: k n , k und k d - Koeffizienten der Proportional-, Integral- und Differentialteile; k p - Übersetzungsverhältnis des Reglers; T. und - Integrationszeitkonstante; T. d ist die Zeitkonstante der Differenzierung.
Die in den verschiedenen Einträgen (5.1) und (5.5) des PID-Gesetzes enthaltenen Parameter hängen durch die folgenden Beziehungen zusammen:
k n =
k p
;
k und \u003d k p /
T. und
;
k d =
k p
T. d. (5.6)
^
5.2. Arten von Präzisions-ACS
7.2.1. Statische Genauigkeit.
Im statischen Modus treten Fehler nur im statischen System auf, und im astatischen System sind sie gleich Null. Daher wird die statische Genauigkeit nur bei der Analyse statischer Systeme bewertet.Ein statisches Steuerungssystem ist ein System, dessen Objekt und Steuerung statische Elemente sindd.h.
W. o (0) \u003d k über und W. p (0) \u003d k p. (5.7)
Einsetzen in die Gleichungen der Dynamik der Regelgröße (4.15) und für den Fehler (4.24) des Einzelschleifensystems p \u003d\u003d 0 und Einstellen der Einfachheit halber x n \u003d 0 und x bei \u003d 0 erhalten wir die statischen Gleichungen des statischen Systems:
Für eine kontrollierte Menge
x = x s k p k o (1 + k p k o) + y in k o (1 + k p k o); (5.8)
Für Fehlersignal
e = x h (1 + k p k o) -1 - y in k o (1 + k p k o) -1. (5.9)
Der erste Term auf der rechten Seite von Gleichung (4.32) charakterisiert den statischen Fehler in Bezug auf die Fahraktion, der zweite - den statischen Fehler in der Störung. Diese beiden Fehler sind größer, je größer die äußeren Einflüsse sind und je kleiner, desto größer der Nenner (1 +) k p k o). Folglich ist die Genauigkeit eines statischen Systems umso besser, je größer das Übertragungsverhältnis der offenen Schleife ist.
Es ist üblich, die Genauigkeit eines statischen Systems anhand des Statismuskoeffizienten zu bewerten
S. \u003d\u003d D. x s / d x p, (5.10)
Wo d x p ist die Abweichung der geregelten Größe x von einem gegebenen Wert, der durch eine Störung erzeugt wird bei in \u003d bei B0 mit offenem Regelkreis; D. x h - die Abweichung des gesteuerten Wertes, der durch dieselbe Störung erzeugt wird bei B0 in einem geschlossenen System. Der Statismuskoeffizient zeigt an, wie oft die Abweichung des Ausgabewerts des gesteuerten Objekts geringer ist als die Abweichung dieses Wertes des unkontrollierten Objekts (bei gleichem Wert des Störungseffekts). Offensichtlich D. x p \u003d D. y b0 k o und D. x s \u003d D. y b0 k o / (1 + k p k o). Daher der Statismuskoeffizient
S. == (1 + k p k o) -1 \u003d\u003d (1 + k) -1 , (5.11)
Wo k = k p k ungefähr - das Übersetzungsverhältnis der offenen Schleife.
Die Genauigkeit eines statischen Systems wird als zufriedenstellend angesehen, wenn der Koeffizient S. \u003d 0,1-0,01. Daher muss der Gesamtübertragungskoeffizient der offenen Schleife des statischen Systems im Bereich von 10 bis 100 liegen
^
5.3. Konzept und Indikatoren des Qualitätsmanagements
Die Qualität eines automatischen Steuersystems wird durch eine Kombination von Eigenschaften bestimmt, die das effektive Funktionieren sowohl des Steuerobjekts selbst als auch der Steuervorrichtung, d. H. Des gesamten Steuerungssystems als Ganzes, sicherstellen. In der Theorie der automatischen Steuerung werden die Begriffe „Steuerungsqualität“ im engeren Sinne verwendet: Sie berücksichtigen nur statische und dynamische Eigenschaften des Systems
. Solche Systemeigenschaften ,
quantifiziert ,
genannt werden qualitätsmanagementindikatoren
. Diese eigenschaften bestimmen die Genauigkeit der Aufrechterhaltung einer kontrollierten Größe auf einem bestimmten Niveau in stationären und transienten ModiDas heißt, sie stellen die Effektivität des Managementprozesses sicher.
Insbesondere haben wir darüber nachgedacht systemgenauigkeit im eingeschwungenen Zustand . Nun werden wir die charakteristischen Qualitätsindikatoren betrachten systemgenauigkeit bei Transienten .
Die Genauigkeit des Systems unter Übergangsbedingungen wird unter Verwendung direkter und indirekter Indikatoren geschätzt. Direkte Indikatoren bestimmt durch den Zeitplan des Übergangsprozesses, der im System mit einem schrittweisen externen Effekt auftritt. Indirekte Indikatoren Qualitäten werden durch die Verteilung der Wurzeln der charakteristischen Gleichung oder durch die Frequenzcharakteristik des Systems bestimmt.
Eine spezielle Kategorie von Qualitätsindikatoren umfasst die sogenannten integrale Schätzungen , die entweder direkt durch die Übergangsfunktion des Systems oder durch die Koeffizienten der Übertragungsfunktion des Systems berechnet werden.
In der Vorlesung wird daran erinnert, dass die Genauigkeit des Systems unter Übergangsbedingungen durch die Werte der Abweichungen der Regelgröße bestimmt wird x (t) von einem gegebenen Wert x s (t) und die Dauer dieser Abweichungen. Die Größe und Dauer der Abweichungen hängt von der Art des Übergangsprozesses im System ab. Die Art des Übergangsprozesses hängt wiederum sowohl von den Eigenschaften des Systems als auch vom Ort der Anwendung externer Einflüsse ab.
Bei der allgemeinsten Bewertung der Qualität wird vor allem auf die Form des Übergangsprozesses geachtet. Folgende typische Transienten werden unterschieden (Abb. 5.1): oszillierend (Kurve 1) eintönig (Kurve 2) und aperiodisch (Kurve 3).

Abb. 5.1. Typische Transienten:
a - im Auftrag; B-Empörung
Jeder der drei Standardprozesse hat seine Vor- und Nachteile, und die Präferenz für die eine oder andere Form des Prozesses wird unter Berücksichtigung der Eigenschaften des verwalteten Objekts vorgenommen. So zum Beispiel bei elektromechanischen Objekten mit komplexen kinematischen Übertragungen ( aufzüge, Bagger, Hebeanlagen) sind scharfe Wechselkräfte unerwünscht, und daher neigen sie bei der Auswahl der Einstellungen der Steuerungssysteme für solche Objekte zu aperiodischen und monotonen Prozessen. Oszillatorische Übergangsprozesse sind in dem von uns betrachteten Anreicherungsapparatsystem zulässig, da kurzfristige Abweichungen der geregelten Größen die Anreicherungsindizes nicht wesentlich beeinträchtigen.
^
10.2. Direkte Indikatoren.
Betrachten Sie die Hauptindikatoren für die Qualität des Managements in Bezug auf ein typisches Einkreisregelungssystem.
In den Graphen der Transienten, die durch eine schrittweise Änderung des Sollwerts verursacht werden x s ( t) (Abb. 5.2, aber) und Störungen bei beim Einwirken am Eingang des Objektes (Abb. 5.2, b) am Ursprung der Ausgabemenge x(t) akzeptierter Wert x(- 0), was vor dem Stufeneffekt war. 

Abb. 5.2. Direkte Indikatoren für die Qualität des Regulierungsprozesses:
A-Kanal-Zuordnung; b-po Störungskanal
Einer der wichtigsten direkten Qualitätsindikatoren ist Überschwingen s (%
),
Dies entspricht dem Verhältnis der ersten maximalen Abweichung der Regelgröße x (t)von seinem festgelegten Wert x (¥
) bis dieser stationäre Wert (siehe Abb. 5.2, aber):
s = 100 (x m - x(¥)) / x(¥) \u003d 100 A. 1 / x(¥). (5.1)
Die Qualität des Managements wird als zufriedenstellend angesehen, wenn das Überschwingen 30-40 nicht überschreitet %.
Für durch Störungen verursachte Transienten bei am Eingang des Objekts (siehe Abb. 5.2, b) Überschwingen kann als das Verhältnis der zweiten (negativen) maximalen Abweichung definiert werden A. 2 bis zur ersten maximalen Abweichung A. 1:
s = 100 A. 2 / (x m - x(¥)) \u003d 100 A. 2 / A. 1 . (5.2)
Der nach dieser Formel berechnete Index für Transienten entlang eines Störungskanals wird auch genannt wackeln .
Ein weiteres wichtiges Merkmal solcher Prozesse ist dynamischer Regelungskoeffizient R. d (%) das ist gleich dem Verhältnis der ersten maximalen Abweichung x m zu Abweichung der Ausgangsvariablen x(t) ungeregeltes Objekt, das durch dieselbe Störung verursacht wird, d.h.
R. d = 100 x m / k o. (5.3)
Koeffizient R. d zeigt, wie effektiv die kompensierende Wirkung des Reglers auf das Objekt ist.
Beachten Sie, dass die allererste maximale Abweichung selbst x m , Das Auftreten von Störungen am Eingang des Objekts ist ein Qualitätsindikator. Geben Sie bei der Bildung der Anforderungen an das System den zulässigen Wert der maximalen Abweichung an.
Die Dauer des Vorhandenseins dynamischer Abweichungen einer kontrollierten Größe x (t) x (¥) Es ist üblich, mehrere charakteristische Zeitpunkte zu bewerten. Der wichtigste dieser Indikatorgruppe ist Übergangsdauer (Regelzeit) t n - zeitintervall vom Zeitpunkt der Anwendung des schrittweisen Effekts bis zu dem Zeitpunkt, nach dem die Abweichungen der geregelten Größe auftreten x (t) von seinem neu etablierten Wert x (¥) wird kleiner als eine gegebene Zahl d p, dh bis zu dem Moment, nach dem die Bedingung | x (t) - x (¥) | < d п. В промышленной автоматике величину d п принимают обычно равной 5 % от установившегося значения x (¥). Bei der Beurteilung der Dauer von Transienten, die durch einen einzelnen störenden Effekt verursacht werden bei Bei der Eingabe des Objekts (siehe Abb. 5.2, b) kann der Wert von d p gleich 5% des Wertes des Übersetzungsverhältnisses des Objekts angenommen werden k o, "fr": ["JGHiExQGxqo"])
 Auto-Generator und wie man es überprüft
Auto-Generator und wie man es überprüft Sichere Verwendung von elektrischen Haushaltsgeräten
Sichere Verwendung von elektrischen Haushaltsgeräten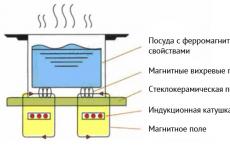 Wirtschaftliche Elektroherde
Wirtschaftliche Elektroherde