Elektromotor - ein Mechanismus, der dazu dient, elektrische Energie in mechanische Energie umzuwandeln. Das Funktionsprinzip eines Elektromotors basiert auf dem Gesetz elektromagnetische Induktion. Typischerweise besteht ein Elektromotor aus einem festen Teil (Stator) und einem Rotor (oder Anker), in dem feste oder rotierende Magnetfelder erzeugt werden. Elektromotoren gibt es in einer Vielzahl von Typen und Modifikationen, sie sind in vielen Bereichen der menschlichen Tätigkeit weit verbreitet und eine der Hauptkomponenten in den Mechanismen und Antrieben von für verschiedene Zwecke. Die Effizienz der Produktion hängt direkt von den Eigenschaften des Elektromotors ab.
Die erforderliche Leistung wird anhand des Gewichts und der Hubgeschwindigkeit berechnet. Um das Gewicht mit einem Elektromotor zu heben, elektrische Energie muss dem Elektromotor zugeführt werden. Mit einem geeigneten Zahnrad muss das Kabel an den Motor angeschlossen werden. Wenn im Gegensatz dazu ein 12-V-Motor 6 Umdrehungen eines 12 mm²-Kabels hat, hat ein 220-V-Motor 110 Umdrehungen eines 0,65 mm²-Kabels. Dann erzeugen beide Wicklungen die gleiche Spannung. magnetfeld.
Wenn Strom durch den Leiter fließt, erwärmt sich der Leiter. Die Wärme kann an einem Kalorienzähler gemessen werden. Es wurde festgestellt, dass die erzeugte Wärmemenge davon abhängt. Leiterspannung Strom durch Leiter Stromdauer. . Die Energieeinheit ist.
Motorklassifizierung
Die Hauptteile davon bestehen Elektromotoren sind Stator und Rotor. Der Rotor ist der Teil des Motors, der sich dreht, und der Stator - der stationär bleibt. Das Funktionsprinzip des Elektromotors besteht in der Wechselwirkung eines rotierenden Magnetfeldes, das durch die Statorwicklung erzeugt wird, und elektrischem Strom, der sich in der geschlossenen Rotorwicklung befindet. Dieser Vorgang leitet die Drehung des Rotors in Feldrichtung ein.
Um einen Liter Wasser bei 20 Grad zum Kochen zu bringen, ist eine Wärmemenge von 80 kcal erforderlich. Die notwendige elektrische Energie wird wie folgt berechnet. Wenn die Heizung eine Leistung von 400 Watt hat, ist dies die erforderliche Zeit. Die Wärmeleistung gibt an, wie viel Wärme pro Zeiteinheit und wie viele Joule pro Sekunde erzeugt werden.
Denn elektrische Energie wird aus Primärenergie erzeugt, die auch bezahlt werden muss. Elektrische Energie kann auch als Batterie gekauft werden. Energie wird durch Leistung und Zeit berechnet. Muss mit Strom versorgt werden. Die Geräte sind für Strom ausgelegt.
Die Haupttypen von Elektromotoren:
- Motor wechselstrom;
- Motor gleichstrom;
- Mehrphasenmotor;
- Einphasenmotor;
- Ventilmotor;
- Schrittmotor;
- Universalverteilermotor.
Wenn wir über Elektromotoren wie sprechen asynchrone Elektromotorendann beziehen sie sich auf den Typ der Wechselstrommotoren. Solche Motoren sind einphasenmotoren und zweiphasig und dreiphasig. Bei Asynchronmotoren stimmt die Frequenz des Wechselstroms in der Wicklung nicht mit der Rotordrehzahl überein. Der Betrieb eines Induktionsmotors wird durch die Zeitdifferenz zwischen der Erzeugung der Magnetfelder des Stators und des Rotors bereitgestellt. Die Rotation des Rotors ist daher gegenüber dem Statorfeld verzögert. Sie können einen asynchronen Elektromotor für Maschinen kaufen, für die keine besonderen Betriebsbedingungen für den Startmechanismus erforderlich sind.
Arten von Elektromotoren je nach Schutzart vor Umwelteinflüssen:
- Explosionsgeschützt;
- Geschützt;
- Geschlossen.
Explosionsgeschützte Motoren Sie haben ein robustes Gehäuse, das bei einer Explosion die Zerstörung aller anderen Teile des Mechanismus und das Auftreten eines Brandes verhindert.
Geschützte Motoren Während des Betriebs werden sie mit speziellen Dämpfern und Gittern geschlossen, die den Mechanismus vor Fremdkörpern schützen. Sie werden in einer Umgebung eingesetzt, in der keine hohe Luftfeuchtigkeit und Verunreinigungen durch Gase, Staub, Rauch und Chemikalien vorhanden sind.
Geschlossene Motoren haben eine spezielle Hülle, die das Eindringen von Staub, Gasen, Feuchtigkeit und anderen Substanzen und Elementen, die den Motormechanismus beschädigen können, nicht zulässt. Solche Elektromotoren sind abgedichtet und undicht.
Anwendungsgebiet frequenzumrichter ziemlich umfangreich. Sie sind in Werkzeugmaschinen und elektrischen Antrieben von Industriemechanismen, Förderbändern, Abluftanlagen usw. gefragt. Das Funktionsprinzip des Chastotnik ist die Regel zur Berechnung der Drehwinkelgeschwindigkeit der Welle, die einen Faktor wie die Frequenz des Versorgungsnetzes enthält. Durch Ändern der Frequenz der Stromversorgung der Motorwicklung ist es somit möglich, die Drehzahl des Motorrotors direkt proportional zu regeln, wodurch die Drehzahl des Elektromotors verringert oder erhöht wird. Diese Geräte werden aufgrund der Methode, mit der die Aufgabe der gleichzeitigen Steuerung von Frequenz und Spannung am Ausgang des Wandlers gelöst wird, auch als "Wechselrichter" bezeichnet. Alle Frequenzumrichter sind notwendigerweise mit Schildern gekennzeichnet, auf denen ihre Eigenschaften angegeben sind:
- Die maximal mögliche Leistung des Elektromotors;
- Versorgungsspannung;
- Anzahl der Phasen (einphasig, dreiphasig).
Die meisten industriellen Frequenzumrichter sind für den Betrieb in ausgelegt dreiphasennetze Wechselstrom gibt es jedoch andere Modelle, zum Beispiel Chastotniks für Einphasenmotoren.
Motoranwendung
Es ist schwer, sich das Leben eines modernen Menschen ohne einen Mechanismus wie einen Elektromotor vorzustellen. Schauen Sie sich um - sie sind fast allgegenwärtig. Heute werden sie nicht nur in allen Branchen eingesetzt, sondern auch in Transportmitteln, Gegenständen und Geräten im Alltag, bei der Arbeit und zu Hause. Haartrockner, Ventilatoren, Nähmaschinen, Bauwerkzeuge - dies ist keine vollständige Liste der Geräte, die Elektromotoren verwenden.
Asynchrone Elektromotoren sind besonders zuverlässig und werden daher häufig in Antrieben von Metallbearbeitungs-, Holzbearbeitungs- und anderen Industriemaschinen, Schmiedepressen, Hebemaschinen, Aufzügen, Web-, Näh- und Erdbewegungsmaschinen, Industrieventilatoren, Kompressoren, Pumpen, Zentrifugen und Betonmischern eingesetzt . Kranelektromotoren werden im Kapital-, Industrie- und Zivilbau, in der Bergbau-, Metallurgie-, Energie- und Transportindustrie eingesetzt.
Metro, Straßenbahn, Trolley - all diese Verkehrsträger verdanken ihre Existenz einem Elektromotor. Es ist heute unmöglich, sich ein Büro- oder Wohnhaus ohne Klimaanlage oder Luftreinigungssystem vorzustellen - sie verwenden auch Elektromotoren. Die Funktion der meisten modernen Geräte ist ohne einen Elektromotor nicht möglich und hängt daher stark von der Qualität und Zuverlässigkeit dieses Mechanismus ab. Der Zusammenbruch kann zu sehr traurigen Ergebnissen führen, sogar zu einem Produktionsstillstand und enormen finanziellen Verlusten. Daher können Sie Elektromotoren nur von einem zuverlässigen und vertrauenswürdigen Lieferanten kaufen, der die Produktqualität garantiert.
Das Funktionsprinzip des Elektromotors
Das Funktionsprinzip des Elektromotors ist die Wirkung des Magnetismus, der es Ihnen ermöglicht, effektiv umzuwandeln elektrische Energie in mechanische. Das Prinzip der Energieumwandlung in verschiedene Arten Elektromotoren sind für alle Arten von Elektromotoren gleich, aber die Konstruktion der Motoren und Verfahren zur Steuerung der Drehzahl des Drehmoments können variieren. Jeder kennt aus der Schule einfachstes Beispiel Elektromotor - wenn sich der Rahmen zwischen den Polen eines Permanentmagneten dreht. Natürlich ist die Vorrichtung des Elektromotors, der in industriellen Mechanismen eingesetzt wird oder haushaltsgeräte viel schwieriger. Schauen wir uns an, wie ein asynchroner Elektromotor funktioniert, der in der Industrie am weitesten verbreitet ist.
Das Funktionsprinzip eines Induktionsmotors.
Funktionsprinzip induktionsmotorbasiert wie andere auf der Verwendung eines rotierenden Magnetfeldes. Die Drehzahl des Magnetfeldes wird als synchron bezeichnet, da sie der Drehzahl des Magneten entspricht. In diesem Fall wird die Drehzahl des Zylinders als asynchron bezeichnet, dh sie stimmt nicht mit der Drehzahl des Magneten überein. Die Drehzahl des Zylinders (Rotors) unterscheidet sich von der synchronen Drehzahl des Magnetfelds um einen kleinen Betrag, der als Schlupf bezeichnet wird. Kraft machen elektrischer Strom Um ein rotierendes Magnetfeld zu erzeugen und damit den Rotor zu drehen, wird normalerweise ein dreiphasiger Strom verwendet.
Elektromotor Gerät
An den Polen eines ringförmigen Eisenkerns, der als Elektromotorstator bezeichnet wird, sind drei Wicklungen angeordnet, dreiphasige Stromnetze, die in einem Winkel von 120 ° relativ zueinander angeordnet sind. Im Inneren des Kerns ist ein Metallzylinder, der als Rotor eines Elektromotors bezeichnet wird, auf einer Achse montiert. Wenn die Wicklungen miteinander verbunden und mit einem dreiphasigen Stromnetz verbunden sind, stellt sich heraus, dass sich der von den drei Polen erzeugte magnetische Gesamtfluss dreht. Gleichzeitig ändert der gesamte Magnetfluss seine Richtung mit einer Änderung der Stromrichtung in den Statorwicklungen (Polen). Darüber hinaus wird der Magnetfluss in einer Periode der Stromänderung in den Wicklungen eine volle Umdrehung machen. Ein rotierender Magnetfluss trägt den Zylinder mit sich und wir erhalten so einen asynchronen Elektromotor.
Die Statorwicklungen können durch einen "Stern" verbunden sein, es entsteht jedoch auch ein rotierendes Magnetfeld, wenn sie durch ein "Dreieck" verbunden sind. Wenn wir die Wicklungen der zweiten und dritten Phase austauschen, kehrt der Magnetfluss seine Drehrichtung um. Das gleiche Ergebnis kann erzielt werden, ohne die Statorwicklungen auszutauschen, sondern indem der Strom der zweiten Phase des Netzwerks zur dritten Phase des Stators und die dritte Phase des Netzwerks zur zweiten Phase des Stators geleitet wird. Sie können also die Drehrichtung des Magnetfelds ändern, indem Sie zwei beliebige Phasen umschalten.
Motoranschluss
Der Stator eines modernen asynchronen Elektromotors hat nicht ausgedrückte Pole, d. H. Die Innenfläche des Stators ist vollständig glatt gemacht. Um Wirbelstromverluste zu reduzieren, wird der Statorkern aus dünnen geprägten Stahlblechen gezogen. Der zusammengebaute Statorkern ist in einem Stahlgehäuse befestigt. In die Nuten des Stators ist eine Wicklung aus Kupferdraht eingelegt. Die Phasenwicklungen des Stators des Elektromotors sind durch einen "Stern" oder ein "Dreieck" verbunden, für das alle Anfänge und Enden der Wicklungen auf dem Gehäuse angezeigt werden - auf einem speziellen Isolierschild. Eine solche Statorvorrichtung ist sehr praktisch, da Sie ihre Wicklungen auf verschiedene Standardspannungen einschalten können.
Der Rotor eines Induktionsmotors ist wie ein Stator aus geprägten Stahlblechen zusammengesetzt. In die Rotorschlitze ist eine Wicklung eingelegt. Asynchronmotoren werden je nach Ausführung des Rotors in Motoren mit unterteilt käfigläufer Rotor und Phasenrotor. Die Wicklung eines Käfigläufer-Rotors besteht aus Kupferstäben, die in die Rotorschlitze eingebettet sind. Die Enden der Stangen sind mit einem Kupferring verbunden. Eine solche Wicklung wird als Wicklung vom Typ "Eichhörnchenkäfig" bezeichnet. Beachten Sie, dass die Kupferstäbe in den Nuten nicht isoliert sind.
Bedingungen für die Wahl eines Elektromotors
Die Wahl eines der Katalogtypen von Elektromotoren gilt als richtig, wenn folgende Bedingungen erfüllt sind:
a) die vollständigste Übereinstimmung des Elektromotors mit der Arbeitsmaschine (Antrieb) hinsichtlich der mechanischen Eigenschaften. Dies bedeutet, dass der Elektromotor eine solche mechanische Eigenschaft aufweisen muss, dass er den Antrieb sowohl während des Betriebs als auch während des Startvorgangs über die erforderlichen Geschwindigkeits- und Beschleunigungswerte informieren kann.
b) maximale Nutzung der Elektromotorleistung während des Betriebs. Die Temperatur aller aktiven Teile des Elektromotors sollte unter schwierigsten Betriebsbedingungen so nahe wie möglich an der in den Normen festgelegten Heiztemperatur liegen, diese jedoch nicht überschreiten.
c) Übereinstimmung des Elektromotors mit den Antriebs- und Umgebungsbedingungen hinsichtlich der Konstruktion;
d) Übereinstimmung des Elektromotors mit den Parametern seines Versorgungsnetzes.
Zur Auswahl eines Elektromotors sind folgende Anfangsdaten erforderlich: 
a) Name und Art des Mechanismus;
b) maximale Leistung auf der Antriebswelle des Mechanismus, wenn die Betriebsart kontinuierlich und die Last konstant ist, und in anderen Fällen - Diagramme der Änderung der Leistung oder des Widerstandsmoments als Funktion der Zeit;
c) die Drehzahl der Antriebswelle des Mechanismus;
d) die Art der Artikulation des Mechanismus mit der Motorwelle (bei Vorhandensein von Zahnrädern sind die Art des Zahnrads und das Übersetzungsverhältnis angegeben);
d) die Größe des Momentes beim Start, der einen Elektromotor auf der Antriebswelle des Mechanismus bereitstellen sollte;
f) die Grenzen der Drehzahlregelung des Antriebsmechanismus, die die oberen und unteren Werte der Drehzahlen und die entsprechenden Werte für Leistung und Drehmoment angeben;
g) Art und Qualität (Laufruhe, Schrittweite) der erforderlichen Geschwindigkeitsregelung;
h) die Häufigkeit von Starts oder Starts der Fahrt innerhalb einer Stunde; i) Umwelteigenschaften.
Die Auswahl eines Elektromotors unter Berücksichtigung aller Bedingungen erfolgt gemäß den Katalogdaten.
Bei weit verbreiteten Mechanismen wird die Auswahl eines Elektromotors durch die in den relevanten Informationen der Hersteller enthaltenen Daten erheblich vereinfacht und auf die Klärung des Elektromotortyps in Bezug auf die Netzwerkparameter und die Art der Umgebung reduziert.
Leistungsauswahl
Die Wahl der Leistung des Elektromotors sollte entsprechend der Art der Lasten der Arbeitsmaschine erfolgen. Dieser Charakter wird aus zwei Gründen bewertet: 
a) entsprechend der nominalen Betriebsart;
b) durch Änderungen der verbrauchten Energiemenge.
Folgende Betriebsarten werden unterschieden:
a) lang (lang), wenn die Arbeitszeit so lang ist, dass elektromotorheizung erreicht seinen stationären Wert (z. B. für Pumpen, Förderbänder, Lüfter usw.);
b) kurzfristig, wenn die Dauer der Arbeitsperiode nicht ausreicht, um den Elektromotor die einer bestimmten Last entsprechende Heiztemperatur zu erreichen, und die Stoppperioden im Gegenteil ausreichen, um den Elektromotor auf Umgebungstemperatur abzukühlen. In diesem Modus können Elektromotoren mit einer Vielzahl von Mechanismen arbeiten.
c) wiederholt und kurzfristig - mit einer relativen Einschaltdauer von 15, 25, 40 und 60% bei einer Dauer von einem Zyklus von nicht mehr als 10 Minuten (z. B. für Krane, einige Maschinen, Schweißgeneratoren mit einem Bediener usw.).
Die folgenden Fälle unterscheiden sich durch Änderungen des Stromverbrauchs:
a) eine konstante Last, wenn die während des Betriebs verbrauchte Energiemenge konstant ist oder geringfügige Abweichungen vom Durchschnittswert aufweist, wie beispielsweise für Kreiselpumpen, Lüfter, Kompressoren mit konstantem Luftdurchsatz usw.;
b) eine variable Last, wenn sich die verbrauchte Energiemenge periodisch ändert, wie zum Beispiel bei Baggern, Kränen, einigen Maschinen usw.;
c) eine pulsierende Last, wenn sich die verbrauchte Energiemenge kontinuierlich ändert, wie beispielsweise bei Kolbenpumpen, Backenbrechern, Sieben usw.
Die Leistung des Elektromotors muss drei Bedingungen erfüllen:
a) normale Erwärmung während des Betriebs; 
b) ausreichende Überlastfähigkeit;
c) ausreichendes Anlaufmoment.
Alle Elektromotoren sind in zwei Hauptgruppen unterteilt:
a) für eine lange Betriebsart (ohne die Dauer des Einschaltens zu begrenzen);
b) für intermittierenden Betrieb mit einer Dauer von 15, 25, 40 und 60%.
Für die erste Gruppe geben die Kataloge und Pässe die Langzeitleistung an, die der Elektromotor auf unbestimmte Zeit entwickeln kann, für die zweite Gruppe - die Leistung, die der Elektromotor entwickeln kann, wenn er mit einer bestimmten Einschaltzeit für eine beliebig lange Zeit intermittierend arbeitet.
In allen Fällen wird der richtige Motor als ein solcher Elektromotor angesehen, der mit der Last, aber mit dem von der Arbeitsmaschine festgelegten Zeitplan arbeitet und eine vollständig zulässige Erwärmung aller seiner Teile erreicht. Die Wahl von Elektromotoren mit der sogenannten „Leistungsspanne“, basierend auf der größtmöglichen Belastung des Zeitplans, führt zu einer Unterauslastung des Elektromotors und folglich zu einer Erhöhung der Kapitalkosten und Betriebskosten durch Reduzierung der Leistungsfaktoren und des Wirkungsgrads.
Eine übermäßige Erhöhung der Leistung des Elektromotors kann auch zu Ruckeln beim Beschleunigen führen.
Wenn der Elektromotor lange Zeit mit einer konstanten oder sich leicht ändernden Last arbeiten muss, ist die Bestimmung seiner Leistung nicht schwierig und wird nach Formeln durchgeführt, die normalerweise empirische Koeffizienten enthalten.
Viel schwieriger ist die Wahl der Leistung von Elektromotoren anderer Betriebsarten.
Die Kurzzeitlast ist dadurch gekennzeichnet, dass die Schaltzeiten kurz sind und die Pausen für eine vollständige Kühlung des Elektromotors ausreichen. In diesem Fall wird angenommen, dass die Last des Elektromotors während der Einschlussperioden konstant oder nahezu konstant gehalten wird.
Damit der Elektromotor in diesem Modus korrekt zum Heizen verwendet werden kann, muss er so ausgewählt werden, dass seine Langzeitleistung (in den Katalogen angegeben) geringer ist als die Leistung, die der Kurzzeitlast entspricht, d. H. Dass der Elektromotor während seines Kurzzeitbetriebs eine thermische Überlastung aufweist.
Wenn die Betriebszeiten des Elektromotors erheblich kürzer sind als die Zeit, die für seine vollständige Erwärmung erforderlich ist, die Pausen zwischen den Schaltzeiten jedoch erheblich kürzer sind als die Zeit der vollständigen Abkühlung, liegt eine wiederholte Kurzzeitbelastung vor.
In der Praxis sollten zwei Arten solcher Arbeiten unterschieden werden:
a) die Last während des Betriebs ist in ihrer Größe konstant und daher wird ihr Graph durch Rechtecke dargestellt, die sich mit Pausen abwechseln;
b) Die Belastung während der Arbeitszeit ändert sich nach einem mehr oder weniger komplexen Gesetz.
In beiden Fällen kann die Aufgabe der Auswahl eines Elektromotors hinsichtlich der Leistung sowohl analytisch als auch grafisch gelöst werden. Beide Methoden sind ziemlich kompliziert, daher wird praktisch eine vereinfachte Methode gleicher Größe empfohlen, die drei Methoden umfasst:
a) quadratischer mittlerer Strom;
b) mittlere quadratische Leistung;
c) das mittlere quadratische Moment.
Überprüfung der mechanischen Überlastfähigkeit des Elektromotors
Nach Auswahl der Leistung des Elektromotors gemäß den Heizbedingungen ist es erforderlich, die mechanische Überlastfähigkeit des Elektromotors zu überprüfen, d. H. Sicherzustellen, dass das maximale Lastmoment gemäß dem Zeitplan während des Betriebs und das Moment beim Start den Wert nicht überschreiten maximaler Moment laut Katalog. 
Bei Asynchron- und Synchronmotoren wird die zulässige mechanische Überlastung durch ihr umkippendes elektromagnetisches Moment bestimmt, wonach diese Motoren anhalten.
Die Vielzahl der maximalen Momente in Bezug auf die Nennmomente sollte 1,8 für dreiphasige asynchrone Elektromotoren mit Schleifringen von mindestens 1,65 für dieselben Eichhörnchen-Elektromotoren betragen. Die Multiplizität des maximalen Moments des Synchronelektromotors muss bei Nennspannungen, Frequenz und Erregerstrom mit einem Leistungsfaktor von 0,9 (bei Vorstrom) ebenfalls mindestens 1,65 betragen.
Fast asynchrone und synchrone Motoren haben eine mechanische Überlastfähigkeit von bis zu 2-2,5, und bei einigen speziellen Elektromotoren steigt dieser Wert auf 3-3,5.
Die zulässige Überlastung von Gleichstrommotoren wird durch die Betriebsbedingungen bestimmt und liegt laut GOST zwischen 2 und 4, die Untergrenze bezieht sich auf Elektromotoren mit Parallelschaltung und die Obergrenze auf Elektromotoren mit Reihenerregung.
Wenn nahrhaft und vertriebsnetz Lastempfindlich, dann sollte eine Überprüfung der mechanischen Überlastfähigkeit unter Berücksichtigung von Spannungsverlusten in den Netzen durchgeführt werden.
Für asynchronen Kurzschluss und synchron-Elektromotoren Die Multiplizität des Anfangsmoments muss mindestens 0,9 betragen (relativ zum Nennwert).
In der Tat ist die Vielzahl des Anfangsmoments für Elektromotoren mit doppelt eichhörnchenkäfig und mit einer tiefen Rille deutlich höher und erreicht 2-2.4.
Bei der Auswahl der Leistung eines Elektromotors ist zu berücksichtigen, dass die Einschaltfrequenz die Erwärmung von Elektromotoren beeinflusst. Die zulässige Schaltfrequenz hängt vom normalen Schlupf, dem Rotordrehmoment und der Einschaltstromvielfalt ab.
Asynchrone Elektromotoren normaler Typen ermöglichen ohne Last 400 bis 1000 und Elektromotoren mit erhöhtem Schlupf - von 1100 bis 2700 Starts pro Stunde. Beim Starten unter Last wird die zulässige Anzahl von Starts deutlich reduziert.
Der Anlaufstrom von Eichhörnchen-Elektromotoren ist groß, und diese Tatsache ist wichtig bei häufigen Anläufen und insbesondere bei längerer Beschleunigungszeit.
Im Gegensatz zu Phasenrotor-Elektromotoren, bei denen ein Teil der beim Starten erzeugten Wärme im Rheostat, d. H. Außerhalb der Maschine, in Eichhörnchen-Elektromotoren abgegeben wird, wird die gesamte Wärme in der Maschine selbst abgegeben, was zu einer erhöhten Erwärmung führt. Daher muss die Wahl der Leistung dieser Elektromotoren unter Berücksichtigung der Erwärmung bei zahlreichen Starts getroffen werden.
 Auto-Generator und wie man es überprüft
Auto-Generator und wie man es überprüft Sichere Verwendung von elektrischen Haushaltsgeräten
Sichere Verwendung von elektrischen Haushaltsgeräten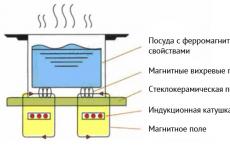 Wirtschaftliche Elektroherde
Wirtschaftliche Elektroherde