Verbessern Sie die Genauigkeit der Regulierung erheblich, indem Sie das PID-Gesetz (Proportional-Integral-Differential Law of Regulation) anwenden.
Zur Implementierung des PID-Gesetzes werden drei Hauptvariablen verwendet:
P - Proportionalitätszone,%;
Ich bin die Integrationszeit, s;
D ist die Zeit der Differenzierung, s.
Manuelle Abstimmung Der PID-Regler (Bestimmen der Werte der Parameter P, I, D), der die erforderliche Regelungsqualität liefert, ist ziemlich kompliziert und wird in der Praxis selten verwendet. PID-Regler der UT / UP-Serie bieten eine automatische Abstimmung der PID-Parameter für einen bestimmten Regelungsprozess, wobei die Möglichkeit ihrer manuellen Einstellung erhalten bleibt.
Proportionalkomponente
In der durch den Koeffizienten P bestimmten Proportionalitätszone ändert sich das Steuersignal proportional zur Differenz zwischen dem Sollwert und dem tatsächlichen Parameterwert (Fehlanpassung):
steuersignal \u003d 100 / P E,
wobei E die Nichtübereinstimmung ist.
Der Proportionalitätskoeffizient (Verstärkung) K ist ein Wert, der umgekehrt proportional zu P ist:
Die Proportionalitätszone wird relativ zu dem spezifizierten Steuersollwert bestimmt, und innerhalb dieser Zone ändert sich das Steuersignal von 0 auf 100%, d. H. Wenn der tatsächliche Wert und der Sollwert gleich sind, hat das Ausgangssignal einen Wert von 50%.

wobei P die Proportionalitätszone ist;
ST - Regelungssollwert.
Zum Beispiel:
Messbereich 0 ... 1000 ° C;
Steuersollwert ST \u003d 500 ° C;
die Proportionalitätszone beträgt P \u003d 5%, was 50 ° C entspricht (5% von 1000 ° C);
Bei einem Temperaturwert von 475 ° C und darunter hat das Steuersignal einen Wert von 100%. bei 525 ° C und darüber - 0%. Im Bereich von 475 ... 525 ° C (im Proportionalbereich) ändert sich das Steuersignal proportional zum Wert der Fehlanpassung mit der Verstärkung K \u003d 100 / P \u003d 20.
Das Verringern des Wertes der Proportionalitätszone P erhöht die Reglerantwort auf die Nichtübereinstimmung, d. H. Eine kleinere Nichtübereinstimmung entspricht einem größeren Wert des Steuersignals. Gleichzeitig nimmt der Prozess aufgrund der großen Verstärkung einen Schwingungscharakter nahe dem Sollwert an, und eine genaue Regelung kann nicht erreicht werden. Wenn die Proportionalitätszone übermäßig erhöht wird, reagiert die Steuerung zu langsam auf die resultierende Fehlanpassung und kann die Prozessdynamik nicht verfolgen. Um diese Nachteile der Proportionalregelung auszugleichen, wird eine zusätzliche zeitliche Charakteristik eingeführt - die integrale Komponente.
Integrale Komponente
Sie wird durch die Integrationszeitkonstante I bestimmt, ist eine Funktion der Zeit und liefert eine Änderung der Verstärkung (Verschiebung des Proportionalbandes) über einen bestimmten Zeitraum.
steuersignal \u003d 100 / P E + 1 / I ∫ E dt.
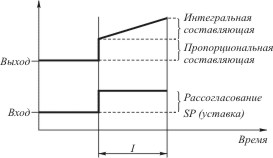
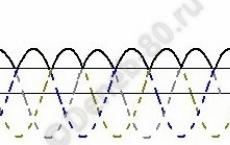
Wie aus der Figur ersichtlich ist, beginnt die Integralkomponente, die Verstärkung über einen Zeitraum I gleichmäßig zu erhöhen, wenn die proportionale Komponente des Steuergesetzes keine Abnahme der Fehlanpassung bewirkt. Nach einer gewissen Zeit I wird dieser Vorgang wiederholt. Wenn die Nichtübereinstimmung klein ist (oder schnell abnimmt), nimmt die Verstärkung nicht zu und nimmt, wenn der Parameterwert gleich dem angegebenen Sollwert ist, einen Mindestwert an. In dieser Hinsicht wird von der integralen Komponente als Funktion des automatischen Ausschaltens der Regelung gesprochen. Bei einer Regelung nach dem PID-Gesetz besteht das Einschwingverhalten des Prozesses aus Schwingungen, die allmählich auf den Wert des Sollwerts abfallen.
Differentialkomponente
Viele Regelungsobjekte sind ausreichend träge, dh sie reagieren verzögert auf die angewendete Aktion (Totzeit) und reagieren weiter, nachdem die Steueraktion entfernt wurde (Verzögerungszeit). PID-Regler an solchen Objekten verspäten sich immer mit dem Ein / Aus-Steuersignal. Um diesen Effekt zu eliminieren, wird eine Differenzialkomponente eingeführt, die durch die Differenzierungszeitkonstante D bestimmt wird, und die vollständige Umsetzung des PID-Regelungsgesetzes wird sichergestellt. Die Differentialkomponente ist die zeitliche Ableitung der Fehlanpassung, d. H. Sie ist eine Funktion der Änderungsrate des Steuerparameters. In dem Fall, in dem die Nichtübereinstimmung ein konstanter Wert wird, hört die Differenzialkomponente auf, das Steuersignal zu beeinflussen.
steuersignal \u003d 100 / P E + 1 / I ∫ E dt + D d / dt E.

Mit der Einführung der Differentialkomponente beginnt die Steuerung, die Totzeit und die Verzögerungszeit zu berücksichtigen, wobei das Steuersignal im Voraus geändert wird. Dies kann Prozessschwankungen um den Sollwert erheblich reduzieren und einen schnelleren Übergangsprozess erzielen.
Somit berücksichtigen PID-Regler, die ein Steuersignal erzeugen, die Eigenschaften des Steuerobjekts selbst, d.h. Führen Sie eine Analyse der Nichtübereinstimmung in Bezug auf Größe, Dauer und Änderungsrate durch. Mit anderen Worten, der PID-Regler "sieht" die Reaktion des Steuerobjekts auf das Steuersignal voraus und beginnt, die Regelaktion nicht zu ändern, wenn der eingestellte Wert erreicht ist, sondern im Voraus.
5. Die Übertragungsfunktion, deren Verbindung dargestellt wird: K (p) \u003d K / Tr
Bei der Erstellung verschiedener Automatisierungsgeräte besteht die Aufgabe häufig darin, eine bestimmte Drehzahl der Motorwelle unabhängig von der aktuellen Last sicherzustellen.
Es ist nicht schwer zu bemerken, dass die Drehzahl der Motorwelle nicht nur von der Spannung am Motor abhängt, sondern auch von externen unbekannten Auswirkungen auf den Motor, wie z. B. variabler Reibungskraft, variierender Last, Temperatur, Schmierqualität und anderen Faktoren. Daher wird die Aufgabe, eine gegebene Drehzahl der Motorwelle bereitzustellen, auf die Aufgabe reduziert, eine solche Spannung am Motor zu erzeugen, die eine gegebene Drehzahl des Motors unabhängig vom Einfluss externer Zufallsfaktoren liefern würde.
Die Lösung dieses Problems ohne Theorie automatische Steuerung unmöglich. Die Lösung des Problems besteht in der Berechnung und Implementierung PID-Drehzahlregler. Dean-Soft-Spezialisten haben Erfahrung in der Lösung solcher Probleme.
Der PID-Regler liefert eine bestimmte Drehzahl am Stellantrieb (Motor), unabhängig von der konstanten oder sich langsam ändernden Last, die auf ihn wirkt.
PID-Regler - Proportional-Intergal-Differential-Regler. Der PID-Regler besteht aus einem Proportional- ( K p ), Integral ( K und / s ) und Differential ( K d s ) Link, jeder von ihnen hat seinen eigenen Gewinn (Abb. 1).
Abb. 1. Strukturdiagramm eines Steuerungssystems mit einem PID-Regler.
Hier: s - Laplace-Operator (manchmal wird er als bezeichnet p ) Wenn wir die Laplace-Transformationen ignorieren, dann die Einträge K p, K und / s und K d s sollte nur als Bezeichnung des entsprechenden Links und nicht als mathematischer Ausdruck verstanden werden. Und schon gar nicht den Blick wert s , weil dies, wie bereits erwähnt, ein Operator ist, keine Variable.
In einem System mit einem PID-Regler die tatsächliche Geschwindigkeit V (t)motor wird mit gemessen Sensor.
Systemeingabe Drehzahlsollwert erreicht V ass(t)in den gleichen Einheiten wie die reale Geschwindigkeit.
Feedback Adder subtrahiert die Geschwindigkeitsreferenz vom Signal V ass (t)echtes Geschwindigkeitssignal V (t) und erzeugt ein Fehlersignal e (t) am Ausgang:
Das Fehlersignal wird an gesendet proportional, integral und differential PID-Reglerverbindungen.
Proportionaler Link multipliziert das Fehlersignal e mit einem Faktor K p und erzeugt ein Ausgangssignal y p.
Integraler Link integriert das Signal e (t) über die Zeit, multipliziert mit einem Koeffizienten K und und erzeugt ein Ausgangssignal y und.
Differentialverbindung differenziert das Fehlersignal nach der Zeit e (t) und multipliziert das Ergebnis mit einer Zahl K d und Erzeugen eines Ausgangssignals y d.
PID-Addierer fasst die Signale zusammen y p(t), y und(t)und y d(t) und erzeugt ein Ausgangssignal y (t):
PWM und Netzschalter ausgelegt, um das berechnete Ausgangssignal an den Motor zu übertragen y (t).
Berechnung der PID-Reglerkoeffizienten
Es ist nicht schwer zu bemerken, dass der PID-Regler durch drei Koeffizienten gekennzeichnet ist K p, K und und K d. Um diese Koeffizienten zu berechnen, müssen die Parameter des Steuerobjekts, in diesem Fall des Motors, bekannt sein.
Die Struktur und Parameter des Steuerobjekts
Aus Sicht der Theorie der automatischen Steuerung des Motors gleichstrom ungefähr beschrieben: durch zwei aperiodische Verbindungen mit einer elektrischen Zeitkonstante T e und mechanische Zeitkonstante T m. Gesamtmotorgewinn K dv (Abb. 2). Tatsächlich ist das Strukturdiagramm des Motors viel komplizierter, aber dies ist in diesem Fall für uns nicht so wichtig.

Abb. 2. Das Strukturdiagramm des Motors in Bezug auf die Theorie der automatischen Steuerung.
Motorübertragungsfunktiongeschrieben durch den Laplace-Operator sFolgendes:
MotorgewinnK dv bestimmt die Proportionalität zwischen der Drehzahl der Motorwelle im Leerlauf und der an den Eingang angelegten Spannung. Einfach ausgedrückt entspricht der Koeffizient dem Geschwindigkeitsverhältnis leerlauf V xx und Motornennspannung U n.
Die Spannung am Motor in der Mikroprozessortechnologie wird in willkürlichen Spannungseinheiten eingestellt, und die Drehzahl wird in willkürlichen Geschwindigkeitseinheiten entfernt.
Wenn eine 7-Bit-PWM verwendet wird, um Spannung am Motor zu erzeugen (siehe unten), dann zur Berechnung K dv Der Wert der Nennspannung beträgt 128 herkömmliche Spannungseinheiten.
Leerlaufdrehzahl w xxDie im Motordatenblatt angegebenen Werte sollten in beliebigen Geschwindigkeitseinheiten erneut gelesen werden V. xxbestimmt durch die Methode der Implementierung des Geschwindigkeitssensors.
Verwenden Sie zum Beispiel einen Inkrementalgeber auf der Motorwelle mit 512 Markierungen pro Umdrehung, um die Geschwindigkeit zu messen. Die Geschwindigkeit in beliebigen Einheiten sei als Anzahl der Markierungen pro Berechnungsschritt D gemessen t. Der durch Auswertung der Leistung des Algorithmus erhaltene Berechnungszyklus sei gleich 0,001 Sekunden. Lassen Sie den Motor im Leerlauf laufen w xx\u003d 5000 U / min
Wir übersetzen die Motordrehzahl in die Sensormarkierungen, wir erhalten: 5000x512 \u003d 2560000 Markierungen / min. Wir übersetzen die Protokolle in die Berechnungsschritte:
Wenn die Motorparameter unbekannt sind, wird die Leerlaufdrehzahl experimentell bestimmt. Dazu wird im Leerlauf die maximale Spannung an den Motor angelegt und die Messwerte vom Drehzahlsensor übernommen V xx.
Mechanische Zeitkonstante T m hängt vom Trägheitsmoment der Motorwelle, des Getriebes und der Trägheit des Stellantriebs ab. Es ist normalerweise nicht möglich, seinen Wert analytisch zu berechnen. Daher wird es experimentell gemessen.
Zu diesem Zweck wird die maximale Spannung bei ihrer Nennlast abrupt an den Motor angelegt und der vorübergehende Vorgang des Änderns der Drehzahl wird entfernt V (t).
Die Geschwindigkeit wird zu diskreten Zeitpunkten vom Geschwindigkeitssensor entfernt, im Mikroprozessor-RAM aufgezeichnet und dann an einen Personal Computer übertragen. Der Personal Computer stellt ein Diagramm der Geschwindigkeitsänderungen wieder her V (t)(Abb. 3).
 |
Abb. 3. Transient in einem Gleichstrommotor.
Entsprechend dem Übergangsplan können Sie zunächst die Leerlaufdrehzahl bestimmen V xxund zweitens die Regelungszeit t p. Die Regelungszeit wird durch die Endzeit des Übergangs bestimmt (die Zeit, zu der die Übergangskurve weniger als 1% des stationären Werts beträgt).
Wenn wir den kleinen Einfluss der elektrischen Zeitkonstante vernachlässigen T enormalerweise eine Größenordnung kleiner als die mechanische Zeitkonstante T mdann kann der Übergang im Gleichstrommotor als aperiodisch mit konstant angesehen werden T m.
Es ist bekannt, dass die Zeit eines aperiodischen Übergangs fünfmal länger ist als seine Zeitkonstante. Das heißt:
Von hier für unseren Fall bekommen wir:
In unserem Fall die Regelungszeit t pGemessen am Zeitplan entspricht dies 1,5 Sekunden. Dann die mechanische Zeitkonstante T m \u003d 1,5 / 5 \u003d 0,3 s.
Indem wir einen Graphen des Übergangsprozesses erstellen, finden wir die mechanische Zeitkonstante T m
Elektrische ZeitkonstanteT e bestimmt die Trägheit der Magnetisierung des Motorankers und ist gleich dem Verhältnis der Induktivität des Motorankers zum Widerstand seiner Wicklung:
In der Praxis sind die Parameter der Induktivität des Ankers schwer zu messen, und dann nehmen sie die elektrische Zeitkonstante um eine Größenordnung kleiner als die mechanische Zeitkonstante:
Für die meisten Motoren gilt dies.
Berechnung der PID-Reglerkoeffizienten.
Um die Koeffizienten des PID-Reglers zu berechnen, sollte das inverse dynamische Problem gelöst werden. Dazu abstrahieren wir vom PID-Regler. Wir nehmen an, dass die Struktur des Reglers, d.h. seine Übertragungsfunktion W p(s) ist uns unbekannt. Hierzu ist die Übertragungsfunktion des Steuerobjekts bekannt. W. dv(s)(Abb. 4).

Abb. 4. Die Anfangsschaltung zur Berechnung des Reglers für einen Gleichstrommotor.
Wir schreiben die Übertragungsfunktion des geschlossenen Systems W s (s):
Bestimmen Sie, welcher Übergangsprozess im System zu uns passt? Wir sind sehr zufrieden mit dem aperiodischen Übergangsprozess im System. So sollte das System auf Änderungen von Geschwindigkeit und Last reagieren.
Lassen Sie die gewünschte Übergangszeit konstant T W. wird ungefähr gleich sein T m. Das heißt, Übertragungsfunktion des gewünschten Systems W W.(s) ist gleich:
Wir setzen die Übertragungsfunktion des geschlossenen Systems mit der Übertragungsfunktion des gewünschten Systems gleich:
Mit einfachen mathematischen Transformationen drücken wir hier den Ausdruck für die Übertragungsfunktion des Reglers aus W p(s):
Ersetzen Sie den Wert W dv(s):
Wir führen die Koeffizienten ein:
Wir bekommen:
Es ist nicht schwer zu bemerken, dass wir gerade den Koeffizienten erhalten haben C. 1 der Koeffizient vor dem Integralglied Mit 2 und der Koeffizient vor dem Differenzierungsglied C. 3. Das heißt, Wir haben die klassische PID-Reglerstruktur mit Parametern K p=Mit 1 , K und=C. 2 und K d=C. 3 :
Implementierung des PID-Reglers auf einem digitalen Mikroprozessor
Systeme mit PID-Reglern werden derzeit nur digital implementiert, und Steuergesetze werden mit billigen Mikroprozessoren der Serien AVR oder MCS-51 berechnet. Beachten Sie, dass Mikroprozessoren Ganzzahlen sind und keine Gleitkommaoperationen unterstützen. Dies erfordert, dass der Programmierer die Algorithmen entsprechend anpasst.
In einem System mit einem PID-Regler wird die Motordrehzahl mit einem Sensor gemessen. Die tatsächliche Geschwindigkeit wird in ganzzahligen willkürlichen Geschwindigkeitseinheiten gemessen. Üblicherweise werden herkömmliche Geschwindigkeitseinheiten so gewählt, dass die Geschwindigkeit in cu variierte im Bereich von -127 bis 127 (ein Byte), im Extremfall von -15 bis 15 (die Geschwindigkeit wird mit einem Rand genommen). In jedem Fall sollte die Anzahl der diskreten Geschwindigkeiten jedoch nicht geringer sein als die erforderliche Anzahl von Geschwindigkeiten.
Die Geschwindigkeit kann mit folgenden Sensoren gemessen werden:

Die eingestellte Geschwindigkeit wird in das System eingegeben in den gleichen willkürlichen Einheiten wie die reale Geschwindigkeit. Die eingestellte Geschwindigkeit wird normalerweise vom Steuerprozessor der oberen Ebene oder vom Personal Computer übertragen und in den entsprechenden Speicherzellen des Mikroprozessors gespeichert.
Feedback Adder subtrahiert von einer gegebenen Geschwindigkeit V ass echte Geschwindigkeit V. und empfängt das sogenannte Fehlersignal e:
Angesichts dieser Geschwindigkeit V ass und V.sind ganze Zahlen im Bereich von -127 bis 127, auf einem ganzzahligen Mikroprozessor ist diese Operation recht einfach. Es sollte darauf geachtet werden, dass das Ergebnis erzielt wird. Wenn e<-127 , то e =127, а если e >12 7, dann ist e \u003d 127.
Fehlersignal egeht zum Eingang des PID-Reglers, d.h. zum Proportionalglied, Integral und Differential.
Proportionaler Link erzeugt ein Ausgangssignal y p durch Multiplizieren des momentanen Fehlersignals mit einem Faktor K p.
Koeffizient K p stellt normalerweise einen nicht ganzzahligen Wert im Bereich von 0,5 bis 2 dar. Daher muss eine Einzelbyte-Ganzzahl multipliziert werden everwenden Sie bei diesem Koeffizienten die Tabelle K P. ichwas im Voraus berechnet wird:
für ich =-127...127Darüber hinaus berücksichtigen die Zahlen in der Tabelle die Einschränkung des Ergebnisses, die sich ebenfalls als Einzelbyte herausstellen sollte und den Wert 127 nicht überschreitet. Wenn das Multiplikationsergebnis also größer als 127 ist, nehmen Sie es gleich 127 und wenn es kleiner als -127 ist, nehmen Sie es gleich -127 .
Programmierer sollten verstehen, dass der Prozessor eine vorzeichenbehaftete Nummer in Betracht zieht ichals vorzeichenloser Index der Tabelle liegen Tabellenelemente mit Indizes von -128 bis -1 tatsächlich im Bereich von Indizes von 128 bis 255.
Dann multiplizieren Sie mit einem Koeffizienten K p ersetzt durch Tabellenelementauswahl K P. ichmit Index e:
Die Tabelle wird normalerweise auf einem PC berechnet und in den Mikroprozessorspeicher geflasht.
Integraler Link erzeugt ein Ausgangssignal y und durch Integrieren des Fehlersignals enach Zeit und Multiplikation mit einem Koeffizienten K und.
Hier: T. - Zeit ab Arbeitsbeginn.
Der digitale Mikroprozessor berechnet das Integral durch schrittweise Integration mit einem Schritt, der dem Taktzyklus des Zeitgebers D entspricht t. Für den diskreten Fall wird die Formel daher ersetzt durch:
Hier ist k die Anzahl der Taktzyklen, die seit Beginn der Arbeit vergangen sind.
Betrachten Sie die Summe aller e k. Tatsächlich ist es nur die Summe aller Werte ebei jeder Maßnahme erhalten. Diese Summe wird als Integralsumme bezeichnet. S. (nicht zu verwechseln mit s - Laplace-Betreiber). Die Integralsumme wird in Form einer globalen Variablen realisiert und bei jedem Schritt um den aktuellen Wert des Fehlersignals erhöht e:
Bei der Berechnung des PID-Reglers wird der Koeffizient K und normalerweise zwischen 0,05 und 2. Messzyklus D. tliegt zwischen 0,0001 und 0,002 Sekunden. Somit ist der Koeffizient K undD. treicht von 5 · 10 -6 bis 4 · 10 - 3. Weil Da dieser Koeffizient viel kleiner als 1 ist, tritt das Problem der ganzzahligen Multiplikation mit ihm auf, weil Nach der Multiplikation wird immer Null erhalten.
Versuchen Sie, den Koeffizienten zu multiplizieren, um dieses Problem zu lösen K undD. tzu einer großen Anzahl A. und dividieren Sie den Integralbetrag durch dieselbe Zahl:

Bezeichnen Sie das Produkt K undD. t · A. durch Koeffizient B. :
Wählen Sie eine solche Nummer A. Vielfaches von 256 x so dass der Koeffizient B. lag im Bereich von 0,05 bis 5.
Um das Verhältnis zu berechnen S / a Erweitern Sie das Vorzeichen der Nummer S. :
wir implementieren eine 16-Bit-Berechnung S.wenn A. =256;
wir implementieren eine 24-Bit-Berechnung S.wenn A. =256 2 ;
wir implementieren eine 32-Bit-Berechnung S.wenn A. =256 3 .
Es ist nicht schwierig, das Hinzufügen zu 16-, 24- oder 32-Bit-Nummern mit Vorzeichen zu implementieren S. signierte 8-Bit-Nummer e. Vergiss das nicht wenn e positiv, wenn das Vorzeichen erweitert wird, werden die höchstwertigen Bits mit Nullen gefüllt, und wenn negativ, werden die höchstwertigen Bits mit Einsen gefüllt. Um die Akkumulation der Integralsumme zu begrenzen, implementieren wir die oberen und unteren Grenzen. Normalerweise geschieht dies wie folgt: Wenn das höchstwertige (vorzeichenbehaftete) Bit nicht dem vorletzten Bit entspricht, sollte das Wachstum der Integralsumme gestoppt werden.
Denken Sie daran, dass Sie eine beliebige Zahl durch 256 teilen x entspricht der Rechtsverschiebung um xbyte rechts. Wir werden diese Regel anwenden. Wir nehmen nur das höchste Byte der Integralsumme S. : Bei einer 16-Bit-Zählung entspricht dies einer Verschiebung von einem Byte, bei einer 24-Bit-Zählung um zwei Bytes, bei einer 32-Bit-Zählung um drei Bytes.
Auf diese Weise:
Wo: S. Senior - High Byte einer Zahl S. .
Multiplikation mit dem Koeffizienten B. Wir implementieren in Form einer Tabelle B. ichähnlich wie bei der Berechnung des Koeffizienten der Proportionalverbindung:
Differentialverbindung
Die Differentialverbindung berechnet das Ausgangssignal y d - e 0 implementieren wir in Form einer Tabelle C. ich, wie bei der Berechnung der Proportionalverbindung:
PID-Addierer
Der Addierer nach dem PID-Regler addiert die Momentanwerte der Signale y p, y und und y d und erzeugt ein Ausgangssignal y:
Beim Summieren sollten Sie sicherstellen, dass das Ergebnis im Bereich von -127 bis +127 liegt, und beispielsweise eine 16-Bit-Summierung implementieren. Wenn das Ergebnis größer als 127 ist, muss es gleich 127 sein, und wenn es kleiner als -127 ist, dann gleich -127.
Das PWM-Signal wird automatisch von den AVR-Mikroprozessoren erzeugt. Ein Mikroprozessor kann bis zu 3 PWM-Hardwaresignale erzeugen. Zusätzlich kann das PWM-Signal vom Software-Timer erzeugt werden.
Bequem 7-Bit-PWM erzeugen. In diesem Fall kann der Steuerleistungsschalter gemäß der in Fig. 1 gezeigten Schaltung angeschlossen werden. 4.
Abb. 4. So verbinden Sie den Netzschalter mit dem PWM-Ausgang.
Hohes (Vorzeichen-) Bit des Ergebnisses yes wird über einen beliebigen E / A-Pin an einen der Eingänge des Netzschalters ausgegeben, und die verbleibenden 7 Bits (das letzte Bit ist Null) können ohne Umwandlung in das PWM-Grenzregister geladen werden.
Lasst es uns beweisen.
Welches musste beweisen.
In Systemen mit diesem Steuermethode schwankt aufgrund des Vorhandenseins von Hysterese und der Begrenztheit des Steuersignals der tatsächliche Wert des Parameters immer periodisch relativ zu einem gegebenen Wert, d. H. Es wird immer eine Nichtübereinstimmung beobachtet. Es ist möglich, die Genauigkeit der Regelung durch Verringern der Schalthysterese geringfügig zu erhöhen, dies führt jedoch zu einer Erhöhung der Schaltfrequenz des Ausgangsrelais und zu einer Verringerung seines Lebenszyklus. Daher sind Regler dieses Typs für Aufgaben ungeeignet, bei denen der Steuerparameter hochdynamisch ist und bei denen eine genaue Aufrechterhaltung des Werts des gesteuerten Parameters erforderlich ist. Eine mögliche Anwendung von Grenzwertreglern sind Objekte mit hoher Trägheit und geringen Anforderungen an die Regelgenauigkeit.
PID-Regelung
Verbessern Sie die Genauigkeit der Regulierung erheblich, indem Sie das PID-Gesetz (Proportional-Integral-Differential Law of Regulation) anwenden.
Zur Implementierung des PID-Gesetzes werden drei Hauptvariablen verwendet:
P - Proportionalitätszone,%;
Ich bin die Integrationszeit, s;
D ist die Zeit der Differenzierung, s.
Die manuelle Abstimmung des PID-Reglers (Bestimmung der Werte der Parameter P, I, D), die die erforderliche Regelungsqualität bietet, ist recht kompliziert und wird in der Praxis nur selten angewendet. PID-Regler der UT / UP-Serie bieten eine automatische Abstimmung der PID-Parameter für einen bestimmten Regelungsprozess, wobei die Möglichkeit ihrer manuellen Einstellung erhalten bleibt.
Proportionalkomponente
In der durch den Koeffizienten P bestimmten Proportionalitätszone ändert sich das Steuersignal proportional zur Differenz zwischen dem Sollwert und dem tatsächlichen Parameterwert (Fehlanpassung):
steuersignal \u003d 100 / P E,
wobei E die Nichtübereinstimmung ist.
Der Proportionalitätskoeffizient (Verstärkung) K ist ein Wert, der umgekehrt proportional zu P ist:
Die Proportionalitätszone wird relativ zu dem spezifizierten Steuersollwert bestimmt, und innerhalb dieser Zone ändert sich das Steuersignal von 0 auf 100%, d. H. Wenn der tatsächliche Wert und der Sollwert gleich sind, hat das Ausgangssignal einen Wert von 50%.
wobei P die Proportionalitätszone ist;
ST - Regelungssollwert.
Zum Beispiel:
Messbereich 0 ... 1000 ° C;
Steuersollwert ST \u003d 500 ° C;
die Proportionalitätszone beträgt P \u003d 5%, was 50 ° C entspricht (5% von 1000 ° C);
Bei einem Temperaturwert von 475 ° C und darunter hat das Steuersignal einen Wert von 100%. bei 525 ° C und darüber - 0%. Im Bereich von 475 ... 525 ° C (im Proportionalbereich) ändert sich das Steuersignal proportional zum Wert der Fehlanpassung mit der Verstärkung K \u003d 100 / P \u003d 20.
Das Verringern des Wertes der Proportionalitätszone P erhöht die Reglerantwort auf die Nichtübereinstimmung, d. H. Eine kleinere Nichtübereinstimmung entspricht einem größeren Wert des Steuersignals. Gleichzeitig nimmt der Prozess aufgrund der großen Verstärkung einen Schwingungscharakter nahe dem Sollwert an, und eine genaue Regelung kann nicht erreicht werden. Wenn die Proportionalitätszone übermäßig erhöht wird, reagiert die Steuerung zu langsam auf die resultierende Fehlanpassung und kann die Prozessdynamik nicht verfolgen. Um diese Nachteile der Proportionalregelung auszugleichen, wird eine zusätzliche zeitliche Charakteristik eingeführt - die integrale Komponente.
Integrale Komponente
Sie wird durch die Integrationszeitkonstante I bestimmt, ist eine Funktion der Zeit und liefert eine Änderung der Verstärkung (Verschiebung des Proportionalbandes) über einen bestimmten Zeitraum.
steuersignal \u003d 100 / P E + 1 / I ∫ E dt.
Wie aus der Figur ersichtlich ist, beginnt die Integralkomponente, die Verstärkung über einen Zeitraum I gleichmäßig zu erhöhen, wenn die proportionale Komponente des Steuergesetzes keine Abnahme der Fehlanpassung bewirkt. Nach einer gewissen Zeit I wird dieser Vorgang wiederholt. Wenn die Nichtübereinstimmung klein ist (oder schnell abnimmt), nimmt die Verstärkung nicht zu und nimmt, wenn der Parameterwert gleich dem angegebenen Sollwert ist, einen Mindestwert an. In dieser Hinsicht wird von der integralen Komponente als Funktion des automatischen Ausschaltens der Regelung gesprochen. Bei einer Regelung nach dem PID-Gesetz besteht das Einschwingverhalten des Prozesses aus Schwingungen, die allmählich auf den Wert des Sollwerts abfallen.
Differentialkomponente
Viele Regelungsobjekte sind ausreichend träge, dh sie reagieren verzögert auf die angewendete Aktion (Totzeit) und reagieren weiter, nachdem die Steueraktion entfernt wurde (Verzögerungszeit). PID-Regler an solchen Objekten verspäten sich immer mit dem Ein / Aus-Steuersignal. Um diesen Effekt zu eliminieren, wird eine Differenzialkomponente eingeführt, die durch die Differenzierungszeitkonstante D bestimmt wird, und die vollständige Umsetzung des PID-Regelungsgesetzes wird sichergestellt. Die Differentialkomponente ist die zeitliche Ableitung der Fehlanpassung, d. H. Sie ist eine Funktion der Änderungsrate des Steuerparameters. In dem Fall, in dem die Nichtübereinstimmung ein konstanter Wert wird, hört die Differenzialkomponente auf, das Steuersignal zu beeinflussen.
steuersignal \u003d 100 / P E + 1 / I ∫ E dt + D d / dt E.
Mit der Einführung der Differentialkomponente beginnt die Steuerung, die Totzeit und die Verzögerungszeit zu berücksichtigen, wobei das Steuersignal im Voraus geändert wird. Dies kann Prozessschwankungen um den Sollwert erheblich reduzieren und einen schnelleren Übergangsprozess erzielen.
Somit berücksichtigen PID-Regler, die ein Steuersignal erzeugen, die Eigenschaften des Steuerobjekts selbst, d.h. Führen Sie eine Analyse der Nichtübereinstimmung in Bezug auf Größe, Dauer und Änderungsrate durch. Mit anderen Worten, der PID-Regler "sieht" die Reaktion des Steuerobjekts auf das Steuersignal voraus und beginnt, die Regelaktion nicht zu ändern, wenn der eingestellte Wert erreicht ist, sondern im Voraus.
 Auto-Generator und wie man es überprüft
Auto-Generator und wie man es überprüft Sichere Verwendung von elektrischen Haushaltsgeräten
Sichere Verwendung von elektrischen Haushaltsgeräten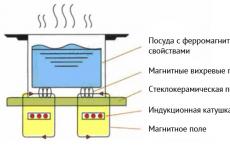 Wirtschaftliche Elektroherde
Wirtschaftliche Elektroherde