Все рисунки, за исключением рис.102, выполнены автором .
Системы автоматического регулирования (САР) применяются для регулирования отдельных параметров (температура, давление, уровень, расход и т.д.) в объекте управления. В современных системах автоматического управления (САУ) системы автоматического регулирования являются подсистемами САУ и их применяют для регулирования различных параметров при управлении объектом или процессом.
Принцип действия всякой системы автоматического регулирования (САР) заключается в том, чтобы обнаруживать отклонения регулируемых величин, характеризующих работу объекта или протекание процесса от требуемого режима и при этом воздействовать на объект или процесс так, чтобы устранять эти отклонения.
Для осуществления автоматического регулирования к регулируемому объекту подключается автоматический регулятор, вырабатывающий управляющее воздействие на регулирующий орган. Это управляющее воздействие вырабатывается регулятором в зависимости от разности между текущим значением регулируемой величины (температуры, давления, уровня жидкости и т. д.), измеряемой датчиком, и желаемым её значением, устанавливаемым задатчиком. Регулируемый объект и автоматический регулятор вместе образуют систему автоматического регулирования.
Основным признаком САР, является наличие главной обратной связи, по которой регулятор контролирует значение регулируемого параметра.
Пример системы регулирования температуры
На Рис. 87 показана блок схема системы регулирования температуры в объекте, а на Рис. 88 функциональная схема САР, показывающая общий принцип работы любой системы автоматического регулирования.
Если температура в объекте равна заданной, то сигнал с датчика X 1 равен сигналу с задатчика X 0 и сигнал ошибки на входе регулятора е = X 1 - X 0 = 0 , сигнала на выходе регулятора нет, ИМ не работает и клапан открыт на заданную величину, поддерживая заданную температуру. Если, например, температура в объекте увеличиться, увеличиться сигнал с датчика X 1 ,возникнет ошибка «е», заработает ИМ и, прикроет клапан РО для уменьшенияподачи тепла, температура в объекте уменьшится до заданной.
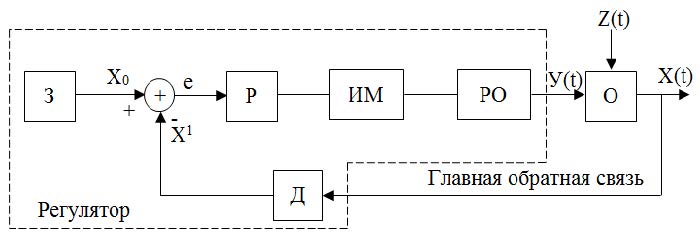
Рис. 88 Функциональная схема САР
З – задатчик, для установки заданного значения параметра X 0
Д – датчик (термопара, терморезистор, датчик уровня, скорости и др. для разных систем)
Р – регулятор
ИМ – исполнительный механизм (эл. мотор с редуктором, пневмоцилиндры и др.)
РО – регулирующий орган (кран, вентиль, заслонка и др.)
О – объект регулирования (печь, эл. мотор, резервуар и др.)
У – регулирующее (управляющее) воздействие
Z – помеха (возмущение)
Х – регулируемый параметр
X 1 – сигнал на выходе датчика
е = X 1 - X 0 ошибка, возникает при отклонении параметра от задания
X 0 – заданное значение регулируемого (управляемого) параметра может быть постоянным X 0 или изменяемым (Ut).
Сигнал с задатчика может быть:
Постоянным X 0 = const . для поддержание постоянства регулируемого параметра температуры, давления, уровня жидкости и т. д. (системы стабилизации);
Может изменяться во времени U(t) по определённой программе (программное регулирование);
Может изменяться во времени U(t) в соответствии с измеряемым внешним процессом (следящее регулирование).
Контрольные вопросы
1.От каких воздействий может измениться регулируемый параметр?
2.Как действует обратная связь, и для чего она нужна?
3.Какие функции выполняют Д и ИМ?
4.Как действует система при возникновении ошибки «е»?
5.Приведите пример системы стабилизации и следящей системы?
Все элементы автоматики по характеру и объему выполняемых операций подразделяют на системы: автоматического контроля, автоматического управления, автоматического регулирования.
(рис. 1) предназначена для контроля за ходом какого-либо процесса. Такая система включает датчик В, усилитель А, принимающий сигнал от датчика и передающий его после усиления на специальный элемент Р, который реализует заключительную операцию автоматического контроля - представление контролируемой величины в форме, удобной для наблюдения или регистрации.
В частном случае в качестве исполнительного элемента Р могут служить сигнальные лампы или звуковые сигнализаторы. Систему с такими элементами называют системой сигнализации
.

Рис. 1. Система автоматического контроля
В систему автоматического контроля кроме указанных на рис. 1, а могут входить и другие элементы - стабилизаторы, источники питания, распределители (при наличии нескольких точек контроля или нескольких датчиков в одном исполнительном элементе Р) и т. д.
Независимо от количества элементов системы автоматического контроля являются разомкнутыми и сигнал в них проходит только в одном направлении - от объекта контроля Е к исполнительному элементу Р.
Система автоматического управления предназначена для частичного или полного (без участия человека) управления объектом либо технологическим процессом. Эти системы широко применяют для автоматизации, например, процессов пуска, регулирования частоты вращения и реверсирования электродвигателей в электроприводах всех назначений.
Необходимо указать на такую важную разновидность систем автоматического управления, как системы автоматической защиты
, которые не допускают аварийного или предельного режима, прерывая в критический момент контролируемый процесс.
![]()
Поддерживает регулируемую величину в заданных пределах. Это наиболее сложные системы автоматики, объединяющие функции автоматического контроля и управления. Составная часть этих систем - регулятор .
Если системы выполняют только одну задачу - поддерживают постоянной регулируемую величину, их называют системами автоматической стабилизации. Однако существуют такие процессы, для которых необходимо изменять во времени регулируемую величину по определенному закону, обеспечивая ее стабильность на отдельных участках. В этом случае автоматическую систему называют системой программного регулирования .
Для обеспечения постоянства регулируемой величины можно использовать один из принципов регулирования - по отклонению, возмущению или комбинированный, которые будут рассмотрены применительно к системам регулирования напряжения генераторов постоянного тока.
При регулировании по отклонению (рис. 2 и 3) элемент сравнения UN сравнивает фактическое напряжение U ф с заданным Uз, определяемым задающим элементом EN. После сравнения на выходе элемента UN появляется сигнал Δ U=Uз - U ф, пропорциональный отклонению напряжения от заданного. Этот сигнал усиливается усилителем А и поступает на рабочий орган L. Изменение напряжения на рабочем органе L, которым является обмотка возбуждения генератора G, приводит к изменению фактического напряжения генератора, устраняющего его отклонение от заданного.
Усилитель А, не изменяющий принципа действия системы, необходим для ее практической реализации, когда мощность сигнала, поступающего от элемента сравнения UN, недостаточна для воздействия на рабочий орган L.

Рис. 2. Система автоматического регулирования

Рис. 3. Автоматическое регулирование по отклонению
Наряду с задающим воздействием на систему могут влиять различные дестабилизирующие факторы Q, которые вызывают отклонение регулируемой величины от заданной. Воздействия дестабилизирующих факторов, один из которых условно обозначен на рисунке буквой Q, могут проявляться в различных местах системы и, как принято говорить, поступать по различным каналам. Так, например, изменение температуры окружающей среды приводит к изменению сопротивления в цепи обмотки возбуждения, что в свою очередь влияет на напряжение генератора.
Однако где бы ни возникали воздействия Q (со стороны потребителя - ток нагрузки, вследствие изменения параметров цепи возбуждения), система регулирования будет реагировать на вызванное ими отклонение регулируемой величины от заданной.
![]()
Наряду с рассмотренным принципом регулирования используют регулирование по возмущению , при котором в системе предусматривают специальные элементы, измеряющие воздействия Q и влияющие на рабочий орган.
В системе, использующей только такой принцип регулирования (рис. 4 и 5), фактическое значение регулируемой величины не учитывается. Принимают во внимание только одно возмущающее воздействие - ток нагрузки I
н. В соответствии с изменением тока нагрузки происходит изменение магнитодвижущей силы (мдс) обмотки возбуждения L2, являющейся измерительным элементом данной системы. Изменение мдс этой обмотки приводит к соответствующему изменению напряжения на выводах генератора.

Рис. 4. Автоматическое регулирование по возмущению

Рис. 5. Принципиальная схема системы автоматики
Система, осуществляющая комбинированное регулирование (по отклонению и возмущению), может быть получена объединением ранее рассмотренных систем в одну (рис. 6)
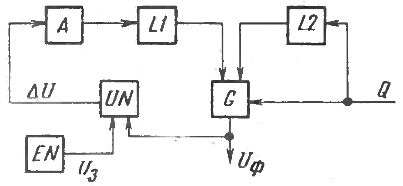
Рис. 6. Система автоматики комбинированного регулирования
В системе автоматического регулирования задающий элемент представлял собой эталон напряжения, с которым сравнивалась регулируемая величина U ф. Значение Up принято называть уставкой регулятора. В общем случае регулируемую величину обозначают буквой Y , а ее уставку Yo .
Если уставку Yo в заданных пределах оператор изменяет вручную, а регулируемой величиной является Y , система работает в режиме стабилизации. Если уставка регулятора изменяется произвольно во времени, система автоматики, поддерживая значение Δ Y = Yo - Y =0, будет работать в следящем режиме, т. е. следить за изменением Yo .
И наконец, если уставку Yo изменять не произвольно, а по заранее известному закону (программе), система будет работать в режиме программного управления. Такие системы называют системами программного регулирования .
замкнутойтой<. lang="lang"> не имеет замкнутой цепи воздействия по регулируемой величине, поэтому ее называют разомкнутой.
замкнутойтой<. lang=" style=">
Системы автоматики по принципу действия подразделяют на статические и астатические. В статических системах регулируемая величина не имеет строго постоянного значения и с увеличением нагрузки изменяется на некоторую величину, называемую ошибкой регулирования.
Рассмотренные системы (рис. 1 - 6) являются примерами простейших статических систем. Наличие ошибки регулирования в них обусловлено тем, что для обеспечения большего тока возбуждения необходимо большее отклонение напряжения.
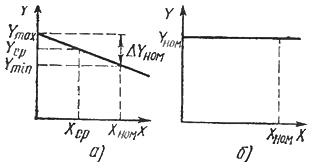
Рис. 7. Внешние характеристики систем автоматики: а - статической, б - астатисческой
Зависимость напряжения генератора от тока нагрузки в виде прямой наклонной линии показана на рис. 7, а. Наибольшее относительное отклонение напряжения от заданного называют статизмом системы по напряжению: Δ = = (Uma x-Umin)/Uma x, где (Uma x, Umin - напряжения генератора на холостом ходу и под нагрузкой. Обобщая сделанное заключение для любой статической системы, можно записать: Δ = (Y ma x- Y min)/Y ma x, где Y - регулируемая величина.
Иногда статизм определяют по другой формуле: Δ = (Y ma x- Y min)/Y ср, причем Y ср=0,5(Y ma x + Y min) - среднерегулируемая величина Y . Статизм называют положительным, если с ростом нагрузки значение Y уменьшается, и отрицательным, если значение Y увеличивается.
В астатических системах статизм равен нулю и поэтому зависимость регулируемой величины от нагрузки представляет собой линию, параллельную оси нагрузки (рис. 7,6).
Рассмотрим, например, астатическую систему автоматики (см. рис. 8), в которой напряжение генератора регулируется изменением сопротивления реостата R , включенного в цепь обмотки возбуждения L.

Рис. 8. Астатическая система автоматики
Серводвигатель М начинает вращаться и перемещать ползунок реостата R всякий раз, когда на входе усилителя А появляется сигнал Δ16;
U об отклонении напряжения генератора U
ср от заданного значения Up
. Ползунок реостата перемещается до тех пор, пока сигнал об отклонении не станет равным нулю. Такая система отличается от другой системы тем, что для поддержания нового значения тока возбуждения не требуется сигнала на выходе усилителя А. Это отличие и позволяет избавиться от статизма.
Во всех ранее приведенных примерах предполагалось, что воздействие на рабочий орган производилось непрерывно в течение всего промежутка времени, пока существует отклонение регулируемой величины от заданной. Такое управление называется непрерывным , а системы - системами непрерывного действия .
Однако существуют системы, называемые дискретными, в которых воздействие на рабочий орган осуществляется с перерывами, например система регулирования температуры подошвы утюга, в которой регулирующее воздействие может принимать только одно из двух фиксированных значений при непрерывном изменении регулируемой величины - температуры.
В этой системе регулирование температуры осуществляется включением и отключением нагревательного элемента R по сигналу датчика температуры (смотрите - ). При увеличении температуры сверх уставки датчик размыкает свой контакт и отключает нагревательный элемент. При снижении температуры ниже уставки нагревательные элементы включаются. Эта система не имеет устойчивого промежуточного состояния рабочего органа, а он занимает лишь два положения - включено в сторону "больше" или включено в сторону "меньше".

Для обеспечения необходимого качества процесса регулирования в системе могут быть предусмотрены специальные устройства, называемые обратными связями . Эти устройства отличаются от других тем, что сигнал в них имеет направление, обратное основному управляющему сигналу.
Для примера на рис. 8 изображена обратная связь Е по отклонению регулируемой величины ΔU
, соединяющая выход усилителя А со входом элемента сравнения UN. При положительной обратной связи
Е на выходе элемента сравнения UN получается сумма величин Δ
U и Z, а при отрицательной - их разность.
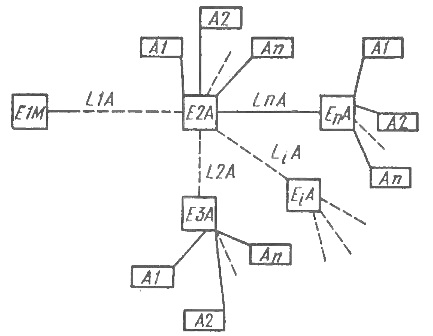
Рис. 9. Структурная схема системы телемеханики
Рассмотренные системы автоматики предполагают непосредственную связь всех входящих в них элементов. Если элементы системы автоматики расположены на значительном удалении друг от друга, для их соединения используют передатчики, каналы связи и приемники. Такие системы называют телемеханическими .
Телемеханическая система состоит из пункта управления, где находится оператор, управляющий работой системы, одного или нескольких контролируемых пунктов, на которых расположены объекты контроля A1 - An, линий связи L1A - LnA (каналы передачи данных), соединяющих пункт управления Е1М с контролируемыми пунктами Е2А - Еn (рис. 9). В телемеханической системе по линиям связи можно передавать как все, так и некоторые виды контрольной и управляющей информации.
При передаче информации только о параметрах ОК телемеханическую систему называют системой телеизмерения , в которой сигналы с выходов датчиков (измерительных преобразователей, установленных на ОК) передаются на пункт управления Е1М и воспроизводятся в виде показаний стрелочных или цифровых измерительных приборов. Информация может передаваться как непрерывно, так и периодически, в том числе и по команде оператора.
Если на пункт управления передается только информация о состоянии, в котором находится тот или иной объект контроля ("включен", "выключен", "исправен", "неисправен"), такую систему называют системой телесигнализации .
Телесигнализация, как и телеизмерение, выдает оператору исходные данные для принятия решения по управлению ОК или служит для выработки управляющих воздействий в системах телеуправления и телерегулировки. Основное отличие этих систем от предыдущих заключается в том, что в первой из них используются дискретные сигналы типа "включить", "выключить", а во второй - непрерывные, подобно обычным системам регулирования.
Классификация систем автоматического регулирования
Системы автоматического регулирования, применяемые в современной технике, весьма разнообразны. Быстрое расширение функционального назначения функционального назначения автоматических систем, ставшее возможным, в частности благодаря внедрению вычислительной техники, увеличивает число реализуемых классов систем. В этих условиях дать законченную подробную классификацию систем автоматического регулирования практически невозможно. Классификации, с успехом применявшиеся в недавнем прошлом, становятся в настоящее время слишком узкими, не охватывающими новых разрабатываемых и реализуемых систем.
Всякая классификация основана на определенных классификационных признаках. С точки зрения общности классификации систем автоматического регулирования наиболее удобным классификационным признаком является используемая информация об объекте регулирования. Следует отметить, что почти все автоматические системы представляют собой нелинейные устройства, которые содержат как переменные, так и распределенные параметры, в которых значение переменных в данный момент времени может зависеть не только от текущих, но и прошлых значений этих переменных.
Каждая автоматическая система характеризуется алгоритмом функционирования - совокупностью предписаний, определяющих характер изменения управляемой величины в зависимости от воздействия
В зависимости от характера изменения составляющих задающего воздействия автоматические системы разделяют на четыре класса:
- системы автоматической стабилизации, в которых задающее воздействие представляет собой постоянную величину, а регулируемая величина автоматически поддерживается неизменной при произвольном изменении нагрузки и внешних условий. Нагрузка объекта регулирования (момент нагрузки на валу электродвигателя, нагрузка гeнератора) в стабилизирующих системах обычно является основным возмущающим воздействием, наиболее резко влияющим на регулируемую величину;
- системы программного регулирования, в которых задающее воздействие и регулируемая величина изменяются по заранее заданному закону. Программную автоматическую систему можно рассматривать как систему стабилизации, в которой задача стабилизации усложняется задачей изменения регулируемой величины по заданной программе. Изменение регулируемой величины по пpoгpaммe достигается добавлением к системе некотоpoгo элемента программного устройства, изменяющего задающее воздействие во времени по заранее определенному закону;
- следящие системы предполагают изменение регулируемой величины в соответствии с изменением задающего воздействия, закон изменения которого является неизвестной функцией. Таким образом, следящая система, как и программная система, воспроизводит задающее воздействие. Однако это воздействие в следящей системе изменяется не по заранее заданной программе, а произвольно. Например, антенна радиолокатора поворачивается следуя за самолетом, траектория движения котopoгo заранее неизвестна, т. е. «следит» за ним. Отсюда происходит и название следящей системы. Задающие воздействия и регулируемые величины следящих систем могут иметь разнообразный характер по своей физической природе. Причем регулируемая величина по своей физической природе может отличаться от задающего воздействия.
-
системы оптимального регулирования обеспечивают оптимальное согласно тому или иному критерию оптимальности поддержание регулируемой величины
В зависимости от того, какой математической моделью описываются процессы в автоматических системах, ониразделяют на:
- линейные автоматические системы, математическая модель которых составлена из линейных или линеаризированных дифференциальных уравнений. Если в уравнении динамики какого-либо звена линейной автоматической системы имеется хотя бы один или несколько переменных во времени коэффициентов, то получаетсялинейная автоматическая система с переменными параметрами. Если какое-либо звено описывается линейными уравнениями в частных производных, то автоматическая система будет линейной автоматической системой с распределенными параметрами. В отличие от этого обыкновенная линейная автоматическая система являетсяавтоматической системой с сосредоточенными параметрами. Если динамика какого-либо звена автоматической системы описывается линейным уравнением с запаздывающим аргументом, то автоматическая система называетсялинейной автоматической системой с запаздыванием;
- нелинейные автоматические системы, математическая модель которых составлена из нелинейных дифференциальных уравнений. К нелинейным автоматическим системам относятся все автоматические системы, в звеньях которых имеются статические характеристики любого из множества видов нелинейности. Нелинейными могут быть автоматические системы с переменными параметрами, с распределенными параметрами, с запаздыванием, импульсные и цифровые автоматические системы, если в них где-то нарушается линейность уравнения динамики.
Классификация систем автоматического регулирования
Каждая автоматическая система состоит из целого ряда звеньев, соединенных соответствующим образом между собой. Каждое отдельно взятое звено имеет вход и выход определяющих воздействие и передачу информации с одного звена на другое. В общем случае любое звено может иметь несколько входов и выходов. Входная и выходная величины могут иметь любую физическую природу.
В процессе работы автоматической системы входные и выходные величины изменяются во времени. Динамика процесса преобразования сигналов в данном звене описывается некоторым уравнением, связывающим выходную переменную со входной переменной. Совокупность уравнений и характеристик всех звеньев описывает динамику процессов управления или регулирования во всей системе в целом.
Основными признаками деления автоматических систем на большие классы по характеру внутренних динамических процессов являются следующие:
- непрерывность или дискретность динамических процессов во времени;
- линейность или нелинейность уравнений, описывающих динамику процессов регулирования.
В зависимости от характера изменения управляющих сигналов автоматические системы разделяют на три класса:
- непрерывные (аналоговые) системы, которые описываются обыкновенными дифференциальными уравнениями и в процессе регулирования структура всех связей в системе остается неизменной. Сигналы на выходе отдельных звеньев такой системы являются непрерывными функциями воздействий и времени. Между звеньями на входе и выходе автоматической системы существует непрерывная функциональная связь. При этом закон изменения выходной величины во времени может быть произвольным, в зависимости от формы изменения входной величины и от вида уравнения динамики звена. Чтобы автоматическая система в целом была непрерывной, необходимо прежде всего, чтобы статические характеристики всех звеньев были непрерывными;
- дискретные (цифровые) системы, которые описываются дифференциально-разностными уравнениями и в них через дискретные промежутки времени происходит размыкание или замыкание цепи управляющего воздействия. В дискретных системах размыкание цепи воздействия производится принудительно и периодически специальными прерывающими устройствами. Такие системы содержат импульсные элементы и осуществляют квантование сигналов как по уровню, так и по времени. Звено, преобразующее непрерывный входной сигнал в последовательность импульсов, называется импульсным. Если последующее звено автоматической системы тоже дискретное, то для него не только выходная, но и входная величины будет дискретной. К дискретным автоматическим системам относятся автоматические системы импульсного регулирования, а также автоматические системы управляющими вычислительными машинами. Эти последние дают результат вычисления на выходе дискретно, через определенные промежутки времени, в виде чисел для отдельных дискретных числовых значений выходной величины;
- релейные (дискретно-непрерывные) системы, которые описываются обоими видами уравнений. В этих системах размыкание или замыкание цепи воздействия осуществляется одним из звеньев системы при непрерывном значении входного воздействия. Размыкание или замыкание осуществляется с помощью реле или звена, имеющего релейную характеристику. Реле срабатывает при определенных значениях воздействий на его чувствительный орган. Релейные системы осуществляют квантование сигналов по времени. Статическая характеристика релейного звена имеет точки разрыва.
Каждый из этих трех классов автоматических систем разделяют на подклассы:
- стационарные автоматические системы с сосредоточенными или распределенными параметрами;
- нестационарные автоматические системы с сосредоточенными или распределенными параметрами.
При исследовании, расчете и синтезе автоматических систем нужно иметь в виду, что наиболее полно разработаны теория и различные прикладные методы для обыкновенных линейных автоматических систем. Поэтому в интересах простоты расчета всегда желательно сводить задачу к такой форме, чтобы максимально использовать методы исследования обыкновенных линейных автоматических систем. Обычно уравнения динамики всех звеньев автоматической системы стараются привести к обыкновенным линейным, и только для некоторых звеньев, где это недопустимо или где специально вводится особое линейное или нелинейное звено, учитываются эти особые их свойства.
Однако это вовсе не значит, что при проектировании новых автоматических систем нужно стремиться к обыкновенным линейным автоматическим системам. Наоборот, совершенно очевидно, что обыкновенные линейные автоматические системы обладают ограниченными возможностями. Введение особых линейных и нелинейных звеньев может придать автоматической системе лучшие качества. Особенно богатыми возможностями обладают автоматические системы со специально вводимыми нелинейностями и дискретные автоматические системы, в том числе с управляющими ЭВМ и микропроцессорные автоматические системы.
По типу и количеству сигналов системы автоматического регулирования подразделяются:
- одноконтурные системы, в которых имеется одна регулируемая величина;
- многоконтурные системы, в которых имеется несколько главных или местных обратных связей;
- системы несвязного регулирования предназначены для регулирования различных величин, не связаны друг с другом и могут взаимодействовать только через общий объект регулирования.
а) в зависимых системах несвязного регулирования изменение одной из регулируемых величин влияет на изменение других. Поэтому в таких системах процессы регулирования нельзя рассматривать изолировано друг от друга;
б) в независимых системах несвязного регулирования изменение одной из регулируемых величин не зависит от изменения остальных;
- системы связного регулирования предполагают наличие нескольких регуляторов, регулируемые величины которых имеют друг с другом взаимные связи, осуществляемые помимо объекта регулирования.
В зависимости от наличия или отсутствия ошибки регулирования САР подразделяются на:
- статические системы это такие системы, которые предполагают наличие постоянной ошибки регулирования (статизма). Характерной особенностью работы статической системы является то, что равновесие системы может быть достигнуто при различных значениях регулируемой величины и каждому значению регулируемой величинысоответствует единственное значение регулирующего органа;
- астатические системы это такие системы, которые при различных значениях внешнего воздействия на объект отклонение регулируемой величины от требуемого значения отсутствует. В таких системах равновесное состояниеимеет место при одном единственном значении регулируемой величины, равном заданному, а регулирующий органдолжен иметь возможность занимать различные положения при одном и том же значении регулируемой величины.
| Содержание | 2 | |
| Введение | 3 | |
| 1. | Общая часть | |
| 1.1. | Основные понятия | 6 |
| 1.2. | Описание исходной схемы автоматического регулирования | 9 |
| 1.3. | Разработка функциональной схемы САР | 13 |
| 2. | Расчетная часть | |
| 2.1. | Параметрический синтез и анализ одноконтурной САР | 14 |
| 2.1.1. | Оценка возможности статического регулирования | 15 |
| 2.1.2. | Оценка возможности астатического регулирования | 20 |
| 2.1.3. | Исследование качества одноконтурной САР | 22 |
| 3. | Разработка контура регулирования заданным параметром | 25 |
| Заключение | 27 | |
| Список используемой литературы | 28 |
Введение
Современная теория автоматического регулирования является основной частью теории управления. Система автоматического регулирования состоит из регулируемого объекта и элементов управления, которые воздействуют на объект при изменении одной или нескольких регулируемых переменных. Под влиянием входных сигналов (управления или возмущения), изменяются регулируемые переменные. Цель же регулирования заключается в формировании таких законов, при которых выходные регулируемые переменные мало отличались бы от требуемых значений. Решение данной задачи во многих случаях осложняется наличием случайных возмущений (помех). При этом необходимо выбирать такой закон регулирования, при котором сигналы управления проходили бы через систему с малыми искажениями, а сигналы шума практически не пропускались.
Теория автоматического регулирования прошла значительный путь своего развития. На начальном этапе были созданы методы анализа устойчивости, качества и точности регулирования непрерывных линейных систем. Затем получили развитие методы анализа дискретных и дискретно-непрерывных систем. Можно отметить, что способы расчета непрерывных систем базируются на частотных методах, а расчета дискретных и дискретно-непрерывных - на методах z-преобразования.
В настоящее время развиваются методы анализа нелинейных систем автоматического регулирования. Нарушение принципа суперпозиции в нелинейных системах, наличие целого ряда чередующихся (в зависимости от воздействия) режимов устойчивого, неустойчивого движений и автоколебаний затрудняют их анализ. Еще с большими трудностями встречается проектировщик при расчете экстремальных и самонастраивающихся систем регулирования.
Как теория автоматического регулирования, так и теория управления входят в науку под общим названием «техническая кибернетика», которая в настоящее время получила значительное развитие. Техническая кибернетика изучает общие закономерности сложных динамических систем управления технологическими и производственными процессами. Техническая кибернетика, автоматическое управление и автоматическое регулирование развиваются по двум основным направлениям: первое связано с постоянным прогрессом и совершенствованием конструкции элементов и технологии их изготовления; второе - с наиболее рациональным использованием этих элементов или их групп, что составляет задачу проектирования систем.
Проектирование систем автоматического регулирования можно вести двумя путями: методом анализа, когда при заранее выбранной структуре системы (расчетным путем или моделированием) определяют ее параметры;
методом синтеза, когда по требованиям, к системе сразу же выбирают
наилучшую ее структуру и параметры. Оба эти способа получили широкое практическое применение и поэтому достаточно полно освещены в настоящей книге.
Определение параметров системы, когда известна ее структура и требования на всю систему в целом, относится к задаче синтеза. Решение этой задачи при линейном объекте регулирования можно найти, используя, например, частотные методы, способ корневого годографа или изучая траектории корней характеристического уравнения замкнутой системы. Выбор корректирующего устройства методом синтеза в классе дробно-рациональных функций комплексного переменного можно выполнить с помощью графоаналитических методов. Эти же методы позволяют синтезировать корректирующие устройства, подавляющие автоколебательные и неустойчивые периодические режимы в нелинейных системах.
Дальнейшее развитие методы синтеза получили на основе принципов максимума и динамического программирования, когда определяется оптимальный с точки зрения заданного критерия качества закон регулирования, обеспечивающий верхний предел качества системы, к которому необходимо стремиться при ее проектировании. Однако решение этой задачи практически не всегда возможно из-за сложности математического описания физических процессов в системе, невозможности решения самой задачи оптимизации и трудностей технической реализации найденного нелинейного закона регулирования. Необходимо отметить, что реализация сложных законов регулирования возможна лишь при включении цифровой вычислительной машины в контур системы. Создание экстремальных и самонастраивающихся систем также связано с применением аналоговых или цифровых вычислительных машин.
Формирование систем автоматического регулирования, как правило, выполняют на основе аналитических методов анализа или синтеза. На этом этапе проектирования систем регулирования на основе принятые допущений составляют математическую модель системы и выбирают предварительную ее структуру. В зависимости от типа модели (линейная или нелинейная) выбирают метод расчета для определения параметров, обеспечивающих заданные показатели устойчивости, точности и качества. После этого уточняют математическую модель и с использованием средств математического моделирования определяют динамические процессы в системе. При действии различных входных сигналов снимают частотные характеристики и сравнивают с расчетными. Затем окончательно устанавливают запасы устойчивости системы по фазе и модулю и находят основные показатели качества.
Далее, задавая на модель типовые управляющие воздействия; снимают характеристики точности. На основании математического моделирования составляют технические требования на аппаратуру системы. Из изготовленной аппаратуры собирают регулятор и передают его на полунатурное моделирование, при котором объект регулирования набирают в виде математической модели.
По полученным в результате полунатурного моделирования характеристикам принимают решение о пригодности работы регулятора с реальным объектом регулирования. Окончательный выбор параметров регулятора и его настройка выполняют в натурных условиях при опытной отработке системы регулирования.
Развитие теории автоматического регулирования на основе уравнений состояния и z-преобразований, принципа максимума и метода динамического программирования совершенствует методику проектирования систем регулирования и позволяет создавать высокоэффективные автоматические системы для самых различных отраслей народного хозяйства. Полученные таким образом системы автоматического регулирования обеспечивают высокое качество выпускаемой продукции, снижают ее себестоимость и увеличивают производительность труда.
1. Общая часть.
1.1. Основные понятия
Преобразование входного сигнала системы (управляющего воздействия) в выходной сигнал (регулируемую величину) определяет закон изменения регулируемой величины. Реализация желаемого закона осуществляется в результате формирования управляющих переменных, которые воздействуют на регулируемую систему. Законы изменения регулируемой величины во времени могут быть различными; математически они описываются оператором системы. Этот оператор может реализовать пропорциональную зависимость выходного сигнала от входного, связь в виде производной или интеграла и т. д. В более общем случае, этот оператор может быть и нелинейным.
Необходимо отметить, что законы изменения регулируемых величин в машинах и агрегатах нарушаются под влиянием внешних, а иногда ивнутренних воздействий, называемых возмущениями (или возмущающими воздействиями). Из определения этих воздействий видно, что система автоматического регулирования должна как можно точнее воспроизводить управляющее воздействие и возможно меньше реагировать на возмущающее воздействие.
Существует три различных принципа построения систем регулирования, обеспечивающих реализацию требуемого закона изменения регулируемой величины: по разомкнутому циклу, по замкнутому циклу, по комбинированному циклу регулирования (замкнуто-разомкнутый). Принцип разомкнутого цикла заключается в обеспечении требуемого закона изменения регулируемой величины непосредственно путем преобразования управляющего воздействия. Принцип замкнутого цикла характеризуется сравнением управляющего воздействия с действительным изменением регулируемой величины за счет применения обратной связи и элемента сравнения. Образующийся в результате сравнения сигнал ошибки не должен превышать некоторой заданно величины. За счет этого и обеспечивается в замкнутых системах требуемый закон изменения регулируемой величины. Комбинированный принцип заключается в сочетании замкнутого и разомкнутого циклов в одной системе.
Автоматическим управлением называется процесс, при котором
операции выполняются посредством системы, функционирующей без вмешательства человека в соответствии с заранее заданным алгоритмом.
Автоматическая система с замкнутой цепью воздействия, в которой управляющее (регулирующее) воздействие вырабатывается в результате сравнения истинного значения управляемой (регулируемой) величины с заданным (предписанным) ее значением, называется АСР.
Производственный процесс - совокупность взаимосвязанных трудовых и технологических процессов, при реализации которых исходные материалы и полуфабрикаты превращаются в готовые изделия.
Автоматическими называются устройства, которые управляют различными процессами и контролируют их без непосредственного участия человека.
Предмет или процесс, подлежащий изучению, называется объектом, а все окружающие предметы взаимодействующие с ними - внешней средой.
Система - совокупность элементов или устройств, находящихся в отношениях и связях между собой и образующих определенную целостность (единство).
Объект управления - совокупность технологических устройств (машин, орудий труда, средств механизации), выполняющих данный процесс с точки зрения управления.
Операция управления - обеспечивает в нужные моменты начало, порядок следования и прекращения рабочих операций, выделяет необходимые для их выполнения ресурсы.
Под управлением понимают процесс организации такого целенаправленного воздействия на объект управления, в результате, которого последний переходит в требуемое (целенаправленное) состояние.
Параметры производственного технологического процесса или технологического процесса или технологического объект, который необходимо поддерживать постоянно или изменять по определенному закону называется управляемой величиной.
Значение управляемой величины, которое согласно заданию должно быть в данный момент времени, называют заданным значением управляемой величины (управляемого параметра).
Схему изображающую последовательность процессов внутри устройства или системы, называется структурной схемой.
Звено - элемент, входящий в САУ в котором определенным образом преобразуется входной параметр в выходной (схематически изображается в виде блока, но не отражает особенности его конструкции).
Информация всегда связана с материальным носителем какой-либо физической величины. В технических системах такие носители называют носителями сигналов (например, электрические напряжения и ток, давление, механическое перемещение и др.), которые можно изменять в соответствии с передаваемой информацией.
1.2. Описание исходной схемы автоматического регулирования.
Поскольку объект регулирования является элементом или звеном АСР, то свойства АСР зависят прежде всего от свойств объекта регулирования. Поэтому для создания работоспособной АСР обеспечивающей требуемое качество регулирования, необходимо прежде всего, знать свойства объекта регулирования (спастические и динамические).
Объект регулирования лабораторного стенда представляет собой объект с распределенными параметрами, т.к. регулируемая величина (температура) неодинакова в различных точках объекта как в равновесном состоянии, так и переходном режиме.
Для увеличения инерционности объекта, которая должна быть в десять раз больше измеряемого в этом объекте датчиком, предусмотрен металлический стакан, наполненный стружкой, а котором расположен датчик температуры. Это поз.воляет увеличить теплообъем объекта.
Требуемая температура (эталонная) задается устройством на входе регулятора-задатчиком (t э).
Возмущение
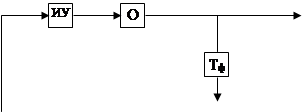 |
Рис. 1. Схема регулирования.
Фактическая температура преобразуется в сигнал устройством t ф. Обозначая сигналы на выходе этих устройств аналогичными им буквами, выразим отклонение фактическое от требуемого в виде сигнала: ∆t = t э – t ф; называемого отклонением или рассогласованием. Регулятор преобразует ∆t по определенному закону управления и включает исполнительное устройство. В нашем случае задача регулятора – ликвидность отклонения ∆t, вызванные действием возмущений В, т.е. различных нагрузок на объекты управления (изменение окружающей температуры, изменение положения шибера и т.д.).
Может возникнуть еще ошибка ∆t за счет изменения t э, но, поскольку является известной заранее функцией, ошибка также может быть рассчитана заранее и скомпенсирована. Подобная система называется системой программного регулирования или просто САР.
В стенде предусмотрено двухпозиционное регулирование. При этом необходимо открыть заслонку, чтобы электронагревательный элемент постоянно обдувался воздухом. Регулирование температуры происходит за счет включения или выключения релейным элементом нагревательного элемента.
Для определения динамических свойств объекта в стенде установлен самопишущий прибор, который регистрирует изменения температуры в объекте и фиксирует их на диаграммной ленте.
Любой технологический агрегат, являющийся объектом регулирования ОР, работает в установившемся режиме, если в нем полностью соблюдается материальный и энергетический баланс. Основной параметр, характеризующий условия протекания технологического процесса (в нашем объекте это температура) в установившемся состоянии остается неизменной.
Зависимость выходной величины от входной величины в установившемся режиме называется статической характеристикой ОР. Статические характеристики могут быть как линейными, с различными коэффициентами наклона, так и нелинейными, при чем большинство реальных объектов в целом имеют нелинейные.
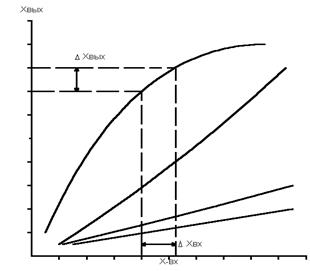
Рис 1.1. Статические характеристики ОР.
Эти характеристики ОР дают возможность оценить степень связи между различными входными и выходными величинами объекта.
Статические характеристики определяют расчетным или экспериментальным путем.
Динамической характеристикой объекта регулирования называется зависимость выходной величины от входной величины в переходном режиме.
Поскольку имения выходной величины ОР при различных возмущениях могут происходить по-разному, для исследования динамических характеристик объекта обычно используют типовые внешние воздействия.
Кривая разгона САР температуры (рис.1.2.) указывает динамические свойства ОР.
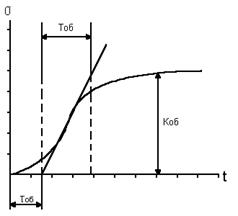
Рис 1.2. Кривая разгона
По рисунку видно, что объект обладает способностью постепенно приостанавливать отклонение выходной величины от первоначального значения и вновь восстанавливается равновесное состояние, т.е. объект обладает свойством самовыравнивания. Такие объекты называются статическими.
Объект обладает запаздыванием Т об, и т.к. оно не значительно, в дальнейшем им будем пренебрегать.
Постоянная времени объекта Т об – это условное время, в течение которого выходная величина изменилась бы от начального до нового установившегося значения, если бы это изменение происходило со скоростью, постоянной и максимальной для данного переходного процесса. Постоянная времени характеризует инерционность объекта, под которой понимают его способность замедленно накапливать и расходовать вещество и энергию, что становится возможным благодаря наличию в составе ОР сопротивлений и емкостей, препятствующих их поступлению и выходу.
Коэффициент передачи К об ОР, представляет собой изменение выходной величины объекта при переходе из начального в новое в установившееся состояние, отнесенное к единичному возмущению на входе.
Единичным возмущением считают однопроцентное изменение входной величины объекта (перемещение регулирующего органа).
Таким образом:

где Х о – значение выходной величины в начальном установившемся состоянии; Х(∞) – тоже, но для нового установившегося состояния; ∆Х вх – величина вносимого возмущения; % хода регулирующего органа.
1.3. Разработка функциональной схемы САР.

Рис 2. Контур трехпозиционного регулирования.
Объект регулирования по своим особенностям статический с самовыравниванием с передаточным запаздыванием, что способствовало в выборе пропорционально-интегрального регулятора.
В схему входит измерение температуры теплоносителя и сравнивая с заданием, регулятор через HS – блок ручного управления, включает контактными «больше» или «меньше» бесконтактный пускатель NS, который в свою очередь управляет исполнительным механизмом, т.е. подачу на теплоноситель воздуха.
При двухпозиционном регулировании релейным элементом регулируется включение теплоносителя.
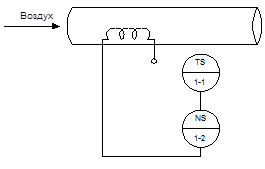
Рис 3. Контур двухпозиционного регулирования.
При достижении определенной температуры, пускатель выключает подачу напряжения на электронагревательный элемент. Измерение и регулирование температуры осуществляется динамометрическим датчиком – реле температуры.
2. Расчетная часть.
2.1. Параметрический синтез и анализ одноконтурной САР.
Анализ САУ с элементами электроавтоматики осуществляется с помощью алгебраических критериев Гаусса и Гурвица, критерия Ляпунова, частотных критериев Михайлова, Найквиста – Михайлова и др.
При анализе САУ изучают вопросы устойчивости и другие качественные показатели разомкнутых и замкнутых САУ находятся запасы устойчивости по модулю и фазе, определяются астатизм замкнутых систем, коэффициенты ошибок для следящих систем и т.д.
К основным качественным показателям систем, которые определяются после нахождения так называемых h-функций, относятся следующие:
1.Время переходного процесса t р, по истечении которого, управляемая величина будет оставаться близкой к установившемуся значению;
2.Установившееся значение регулируемой величины h¥=limh(t)=h y ;
3.Максимальное перерегулирование y=(h max -h y)/h y (здесь h max -значение первого максимума);
4.Частота колебаний w=2p/Т (здесь Т-период колебаний);
5.Число колебаний переходного процесса n;
6.Время достижения первого максимума t max ;
Важным показателем качества САУ является их надежность. Качественные показатели определяются путем решения дифференциальных уравнений, которыми описываются уже известные структуры САУ.
Синтез САУ заключается в нахождении структур и параметров ее, которые бы отвечали заданным показателям качества. Синтез является более трудной задачей по сравнению с анализом. Основными методами используемыми при синтезе САУ является аналитический, графоаналитический и машинный (с помощью вычислительных машин).
2.1.1. Оценка возможности статического регулирования.
При выборе регулятора необходимо знать численные динамические сведения об объекте регулирования, т.е. К 0 ; Т об;t 0 , которые определим по разгонной характеристике.
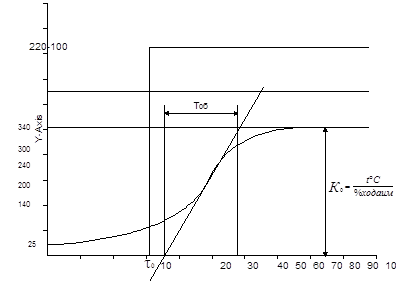
Рис 4. Кривая разгона САР температуры лабораторного стенда.
Тип регулятора ориентировочно выбирают по отношению t/T об;
Критерии выбора регуляторов по роду действия.
Для исследования и расчета структурную схему АСР путем эквивалентных преобразований следует привести к простейшему стандартному виду объект-регулятор. Это необходимо, во-первых, для того чтобы определить ее передаточные функции, а следовательно, и математические зависимости, которыми определяются переходные процессы в системе, и во-вторых, как правило, все инженерные методы расчета и определения параметров настройки регуляторов применено для такой стандартной структуры.
Так исходная структурная схема САР температуры по типовой функциональной схеме (см. чертежи) может быть представлена в виде изображенном на рисунке.
Где W P (р), W ИМ (р), W PO (р), W OP (р), W ИУ (р), - соответственно передаточные функции регулятора, исполнительного механизма, регулирующего органа, объекта регулирования и измерительного устройство.
На структурной схеме все воздействия (сигнала) следует указывать в преобразованном по Лапласу виде.
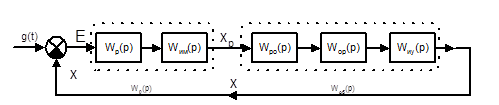
Рис 5. Преобразованная структурная схема САР (t).
Все звенья, определяющие динамические свойства узлов сопряжения (соединения, взаимосвязи) объекта с регулятором (например регулирующие органы, линии связи, измерительные устройства, датчики т.п.), целесообразно, как правило, относить к объекту регулирования.
Если в системе непосредственно регулятор и исполнительный механизм реализуют закон регулирования, то передаточная функция регулятора
W P (р)=W у (р) W ИМ (р)
Статическое регулирование характеризуется наличием П – регулятора, тогда
W P (р)=К рег
При оптимизации значений, по экспериментальным данным целесообразно К – коэффициент регулятора принимать К=10
Передаточная функция объекта регулирования с учетом отнесенных к собственно объекту звеньев, имеет вид:
W об (р)= W PO (р)W OP (р)W ИУ (р)
В общем случае любая одномерная АСР с главной обратной связью путем постепенного укрепления звеньев может быть приведена к простейшему виду, передаточная функция разомкнутой системы, которой
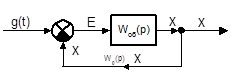 W(p)=W P
(p)*W ОБ
(p)
W(p)=W P
(p)*W ОБ
(p)
Кривая разгона САР температуры показывает, что объект инерционный, статический и имеет запаздывание, так как запаздывание незначительно. В дальнейшем исследовании им можно пренебречь. Тогда передаточная функция объекта будет иметь следующий вид:
W об (р)=К об /(Т об р+1)
Передаточная функция разомкнутой системы
W(p)=W P (p)*W ОБ (p)
 - при статическом регулировании.
- при статическом регулировании.
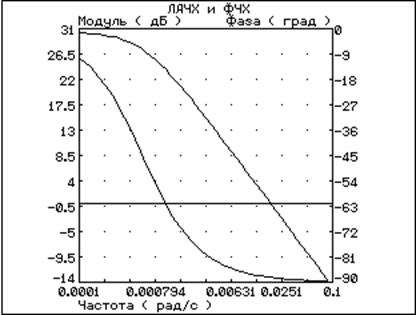
Рис 6. ЛАЧХ и ЛФЧХ для объекта.
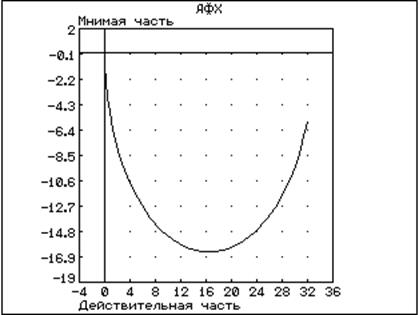
Рис 7. АФХ для объекта.
Найдем передаточную функцию замкнутой системы:
Т.к. величина постоянных времени определяется конструктивными особенностями элементов системы, то настройка системы регулирования осуществляется только изменением ее коэффициента К путем воздействия на коэффициент передачи К р регулятора.
Для определения устойчивости системы строим амплитудно-частотную, фазо-частотную характеристики в логарифмическом масштабе и по замкнутой системе строим годограф.
Рис 8. ЛАХЧ и ЛФЧХ при статическом регулировании.
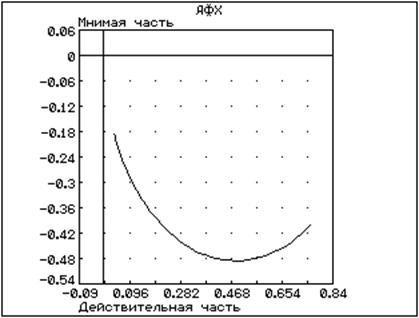
Рис 9. Амплитудно-фазовая характеристика замкнутой системы.
По графикам видим, что при коэффициенте регулятора К р =10 запас устойчивости выполняется, т.к. на частоте среза w ср фаза меньше 180°, что характеризует устойчивость системы при статическом регулировании, значит возможно использование П-регулятора для САР температуры.
2.1.2. Оценка возможности астатического регулирования.
Одним из признаков астатического звена (или системы в целом) является наличие комплексного переменного Р в качестве множителя в знаменателе передаточной функции, т.е. наличие интегрирующей составляющей.
Рассмотрим возможность ПИ-закона регулирования САР температуры. Для этого построим структурную схему, в которую включим ПИ-регулятор.
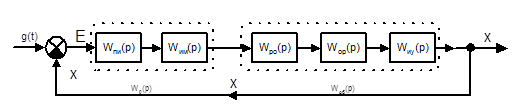
Рис 10. Структурная схема САР температуры.
Передаточная функция ПИ-регулятора имеет вид
Частотные характеристики показывают, что система имеет запас устойчивости, как по амплитуде, так и по фазе, т.к. на частоте среза w ср фаза < 180° значит возможно использовать ПИ регулятор для САР температуры.
2.1.3. Исследование качества одноконтурной САР.
К автоматическим системам регулирования предъявляются требования не только в отношении ее устойчивости. Для работоспособности системы не менее необходимо, что бы процесс автоматического регулирования при определенных качественных показателей.
Требования к качеству процесса регулирования в каждом случае могут быть самыми разнообразными, однако из всех качественных показателей можно выделить несколько наиболее существенных, которые с достаточной полнотой определяют качество почти всех АСР.
Качество процесса регулирования системы, как правило, оценивают по ее переходной функции.
Основными показателями качества является: - время регулирования t р – называется время, в течении которого, начиная с момента приложения воздействия на систему отклонения регулируемой величины Dh(t) от ее установившегося значения h 0 =h(¥) будут меньше на пред заданной величины Е. Обычно принимают, что по истечении времени регулирования отклонении регулируемой величины от установившегося значения должно быть не более Е=5%. Таким образом, время регулирования определяет длительность (быстродействие) переходного процесса.
Перерегулированием s называется максимальное отклонение Dh max регулируемой величины от установившегося значения, выраженное в процентах от h 0 =h(¥).
Абсолютная величина Dh max определяется из кривой переходного процесса:
Dh max =h max - h(¥)
Соответственно перерегулирование будет равно:
Колебательность системы характеризуется числом колебаний регулируемой величины за время регулирования t р. Если за это время переходный процесс в системе совершает число колебаний меньше заданного, то считается, что система имеет требуемые качеством регулирования в части ее колебательности;
Установившаяся ошибка Е. Установившееся значение регулируемой величины h 0 в окончании переходного процесса зависит от астатизма n системы. В статических системах (n=0) – установившаяся ошибка при постоянной величине входного воздействия не равна 0 и следовательно, установившееся значение регулируемой величины h 0 будет отличаться от ее заданного значения на величину установившейся ошибки.
По каналу возмущающего воздействия величина ошибки определяется выражением
где x 0 -постоянное задающее воздействие; К – коэффициент передачи системы.
По каналу возмущающего воздействия величина ошибки согласно выражения
где f 0 – постоянное возмущающее воздействие; К об – коэффициент передачи объекта регулирования; К р – коэффициент передачи регулятора.
Сравнивая переходные функции статического и астатического регулирования, выбираем оптимальный регулятор для САР температуры.
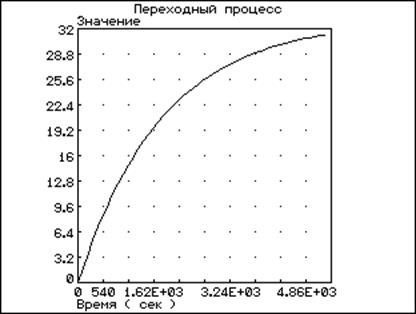
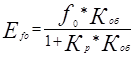
Рис 13. Переходная функция САР с П-регулятором
Рис 14. Переходная функция САР с ПИ-регулятором
По графикам видно, что время регулирования с ПИ-регулятором меньше, чем с П-регулятором; значит для САР температуры целесообразно применить импульсный регулятор выполняющий ПИ-закон регулирования.
Для расчетов использовали на компьютере программу «Classic».
3. Разработка схемы контура регулирования заданным параметром.
Схемы выполнены по ГОСТ 2.710-81.
Рис 15. Контур трехпозиционного регулирования.
Подача питания на лабораторный стенд производится автоматом питания SF1 схема №003Э3. При этом включается нагревательный элемент объекта управления через размыкающий контакт КМ 1.1. реле КМ 1, и вторичный показывающий самопишущий прибор КСУ 4. В положении 90° универсального переключателя SA1 электродвигатель вентилятора. В положении -45°, переключателя SA1, включается в позиционное регулирование, в положении +45° - трехпозиционное регулирование.
При 2-х позиционном регулировании через размыкающий контакт датчика ТУДЭ1 включена обмотка реле КМ1. При превышении установленной температуры на датчике, его контакт размыкается и размыкает контакт КМ1.1, выключая при этом нагревательный элемент, о чем оповещает сигнальная лампа HL4.
Трехпозиционное регулирование показано на схеме №004Э2. В автоматическом режиме электрический сигнал от термопреобразователе ТСМУ последовательно поступает сначала на вход прибора КСУ4(2) зажим 12 и через зажим 11 поступает на вход 25 регулирующего блока РБИ 1-П.
На вход РБИ 1-П зажим 21 от задатчика РЗД подается также токовый сигнал, пропорциональный заданному значению температуры.
На выходе регулятора, зажимами 7 и 9 выдается сигнал «Меньше» и «Больше» соответственно, относительно средней точки зажима 10. Сигнал проходит через БРУ и размыкающие контакты SQ1 и SQ2 исполнительного механизма ИМ, которые управляют пускателем ПБР зажимы 7 и 9. ПБР включает ИМ контактами 1, 2 и 3.
В ручном режиме управления ИМ проходит кнопками БРУ «Больше» или «Меньше».
Заключение
Для рассчитываемой системы объекта произведены следующие расчеты:
Разработка функциональной схемы автоматического регулирования. Получена передаточная функция и структурное преобразование схемы объекта управления. Построены частотные характеристики объекта управления. Произведена оценка возможностей статического объекта регулирования (П-регулятор), а также оценка возможности астатического объекта регулирования (ПИ-регулятор). Произведено исследование качества одноконтурной системы автоматического регулирования.
Выполнено построение желаемых частотных характеристик скорректированной системы. Выполнен выбор и расчёт корректирующего устройства. Произведена оценка качества скорректированной системы.
Выполнена разработка схемы контура регулирования заданным параметром.
На основании проведенных расчетов можно сказать, что подбор корректирующего устройства произведен, верно, и отвечает показателям качества системы с произведенной коррекцией.
Список используемой литературы.
- И.Ю. Топчев «Атлас для проектирования CAP»
- B.C. Чистяков «Краткий справочник по теплотехническим измерениям»
- Н.Н.Иващенко «Автоматическое регулирование»
4. В.В. Черенков «Промышленные приборы и средства автоматизации»
По принципу регулирования все системы автоматического регулирования подразделяются на четыре класса.
1. Система автоматической стабилизации - система, в которой регулятор поддерживает постоянным заданное значение регулируемого параметра.
2. Система программного регулирования - система, обеспечивающая изменение регулируемого параметра по заранее заданному закону (во времени).
3. Следящая система - система, обеспечивающая изменение регулируемого параметра в зависимости от какой-либо другой величины.
4. Система экстремального регулирования - система, в которой регулятор поддерживает оптимальное для изменяющихся условий значение регулируемой величины.
Для регулирования температурного режима электронагревательных установок применяются в основном системы двух первых классов.
Системы автоматического регулирования температуры по роду действия можно разделить на две группы: прерывистого и непрерывного регулирования.
Автоматические регуляторы по функциональным особенностям разделены на пять типов: позиционные (релейные), пропорциональные (статические), интегральные (астатические), изодромные (пропорционально-интегральные), изодромные с предварением и с первой производной.
Позиционные регуляторы относятся к прерывистым САР, а остальные типы регуляторов - к САР непрерывного действия. Ниже рассмотрены основные особенности позиционных, пропорциональных, интегральных и изодромных регуляторов, имеющих наибольшее применение в системах автоматического регулирования температуры.
(рис. 1) состоит из объекта регулирования 1, датчика температуры 2, программного устройства или задатчика уровня температуры 4, регулятора 5 и исполнительного устройства 8. Во многих случаях между датчиком и программным устройством ставится первичный усилитель 3, а между регулятором и исполнительным устройством - вторичный усилитель 6. Дополнительный датчик 7 применяется в изодромных системах регулирования.
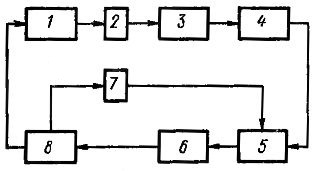
Рис. 1. Функциональная схема автоматического регулирования температуры
Позиционные (релейные) регуляторы температуры
Позиционными называют такие регуляторы, у которых регулирующий орган может занимать два или три определенных положения. В электронагревательных установках применяются двух- и трехпозиционные регуляторы. Они просты и надежны в эксплуатации.
На рис. 2 показана принципиальная схема двухпозиционного регулирования температуры воздуха.
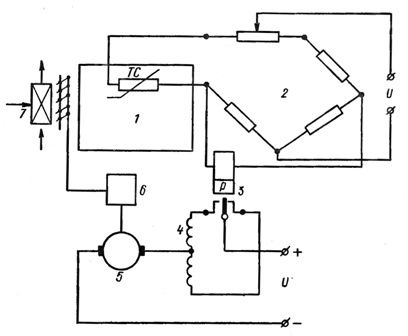
Рис. 2. Принципиальная схема двухпозиционного регулирования температуры воздуха: 1 - объект регулирования, 2 - измерительный мост, 3 - поляризованное реле, 4 - обмотки возбуждения электродвигателя, 5 - якорь электродвигателя, 6 - редуктор, 7 - калориф.
Для контроля температуры в объекте регулирования служит термосопротивление ТС, включенное в одно из плеч измерительного моста 2. Величины сопротивлений моста подбираются таким образом, чтобы при заданной температуре мост был уравновешен, то есть напряжение в диагонали моста равнялось нулю. При повышении температуры поляризованное реле 3, включенное в диагональ измерительного моста, включает одну из обмоток 4 электродвигателя постоянного тока, который с помощью редуктора 6 закрывает воздушный клапан перед калорифером 7. При понижении температуры воздушный клапан полностью открывается.
При двухпозиционном регулировании температуры количество подаваемого тепла может устанавливаться только на двух уровнях - максимальном и минимальном. Максимальное количество тепла должно быть больше необходимого для поддержания заданной регулируемой температуры, а минимальное - меньше. В этом случае температура воздуха колеблется около заданного значения, то есть устанавливается так называемый автоколебательный режим (рис. 3, а).
Линии, соответствующие температурам τ
н и τ
в, определяют нижнюю и верхнюю границы зоны нечувствительности. Когда температура регулируемого объекта, уменьшаясь, достигает значения τ
н количество подаваемого тепла мгновенно увеличивается и температура объекта начинает возрастать. Достигнув значения τ
в, регулятор уменьшает подачу тепла, и температура понижается.
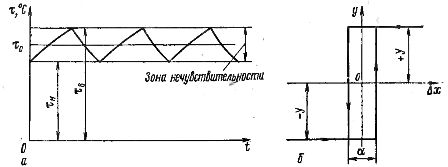
Рис. 3. Временная характеристика двухпозиционного регулирования (а) и статическая характеристика двухпозиционного регулятора (б).
Скорость повышения и понижения температуры зависит от свойств объекта регулирования и от его временной характеристики (кривой разгона). Колебания температуры не выходят за границы зоны нечувствительности, если изменения подачи тепла сразу вызывают изменения температуры, то есть если отсутствует запаздывание регулируемого объекта .
С уменьшением зоны нечувствительности амплитуда колебаний температуры уменьшается вплоть до нуля при τ н = τ в. Однако для этого требуется, чтобы подача тепла изменялась с бесконечно большой частотой, что практически осуществить чрезвычайно трудно. Во всех реальных объектах регулирования имеется запаздывание. Процесс регулирования в них протекает примерно так.
При понижении температуры объекта регулирования до значения τ н мгновенно изменяется подача тепла, однако из-за запаздывания температура некоторое время продолжает снижаться. Затем она повышается до значения τ в, при котором мгновенно уменьшается подача тепла. Температура продолжает еще некоторое время повышаться, затем из-за уменьшенной подачи тепла температура понижается, и процесс повторяется вновь.
На рис. 3, б приведена статическая характеристика двухпозиционного регулятора . Из нее следует, что регулирующее воздействие на объект может принимать только два значения: максимальное и минимальное. В рассмотренном примере максимум соответствует положению, при котором воздушный клапан (см. рис. 2) полностью открыт, минимум - при закрытом клапане.
Знак регулирующего воздействия определяется знаком отклонения регулируемой величины (температуры) от ее заданного значения. Величина регулирующего воздействия постоянна. Все двухпозиционные регуляторы обладают гистерезисной зоной α
, которая возникает из-за разности токов срабатывания и отпускания электромагнитного реле.
Пример использования двухпозиционного регулирования температуры:
Пропорциональные (статические) регуляторы температуры
В тех случаях, когда необходима высокая точность регулирования или когда недопустим автоколебательный процесс, применяют регуляторы с непрерывным процессом регулирования . К ним относятся пропорциональные регуляторы (П-регуляторы) , пригодные для регулирования самых разнообразных технологических процессов.
В тех случаях, когда необходима высокая точность регулирования или когда недопустим автоколебательный процесс, применяют регуляторы с непрерывным процессом регулирования. К ним относятся пропорциональные регуляторы (П-регуляторы), пригодные для регулирования самых разнообразных технологических процессов.
В системах автоматического регулирования с П-регуляторами положение регулирующего органа (у) прямо пропорционально значению регулируемого параметра (х):
y=k1х,
где k1 - коэффициент пропорциональности (коэффициент усиления регулятора).
Эта пропорциональность имеет место, пока регулирующий орган не достигнет своих крайних положений (конечных выключателей).
Скорость перемещения регулирующего органа прямо пропорциональна скорости изменения регулируемого параметра.
На рис. 4 показана принципиальная схема системы автоматического регулирования температуры воздуха в помещении при помощи пропорционального регулятора. Температура в помещении измеряется термометром сопротивления ТС, включенным в схему измерительного моста 1.

Рис. 4. Схема пропорционального регулирования температуры воздуха: 1 - измерительный мост, 2 - объект регулирования, 3 - теплообменник, 4 - конденсаторный двигатель, 5 - фазочувствительный усилитель.
При заданной температуре мост уравновешен. При отклонении регулируемой температуры от заданного значения в диагонали моста возникает напряжение разбаланса, величина и знак которого зависят от величины и знака отклонения температуры. Это напряжение усиливается фазочувствительным усилителем 5, на выходе которого включена обмотка двухфазного конденсаторного двигателя 4 исполнительного механизма.
Исполнительный механизм перемещает регулирующий орган, изменяя поступление теплоносителя в теплообменник 3. Одновременно с перемещением регулирующего органа происходит изменение сопротивления одного из плеч измерительного моста, в результате этого изменяется температура, при которой уравновешивается мост.
Таким образом, каждому положению регулирующего органа из-за жесткой обратной связи соответствует свое равновесное значение регулируемой температуры.
Для пропорционального (статического) регулятора характерна остаточная неравномерность регулирования .
В случае скачкообразного отклонения нагрузки от заданного значения (в момент t1) регулируемый параметр придет по истечении некоторого отрезка времени (момент t2) к новому установившемуся значению (рис. 4). Однако это возможно только при новом положении регулирующего органа, то есть при новом значении регулируемого параметра, отличающегося от заданного на величину δ
.

Рис. 5. Временные характеристики пропорционального регулирования
Недостаток пропорциональных регуляторов состоит в том, что каждому значению параметра соответствует только одно определенное положение регулирующего органа. Для поддержания заданного значения параметра (температуры) при изменении нагрузки (расхода тепла) необходимо, чтобы регулирующий орган занял другое положение, соответствующее новому значению нагрузки. В пропорциональном регуляторе этого не происходит, вследствие чего возникает остаточное отклонение регулируемого параметра.
Интегральные (астатические регуляторы)
Интегральными (астатическими) называются такие регуляторы, в которых при отклонении параметра от заданного значения регулирующий орган перемещается более или менее медленно и все время в одном направлении (в пределах рабочего хода) до тех пор, пока параметр снова не примет заданного значения. Направление хода регулирующего органа изменяется лишь тогда, когда параметр переходит через заданное значение.
В интегральных регуляторах электрического действия обычно искусственно создается зона нечувствительности, в пределах которой изменение параметра не вызывает перемещений регулирующего органа.
Скорость перемещения регулирующего органа в интегральном регуляторе может быть постоянной и переменной. Особенностью интегрального регулятора является отсутствие пропорциональной связи между установившимися значениями регулируемого параметра и положением регулирующего органа.
На рис. 6 приведена принципиальная схема системы автоматического регулирования температуры при помощи интегрального регулятора. В ней в отличие от схемы пропорционального регулирования температуры (см. рис. 4) нет жесткой обратной связи.
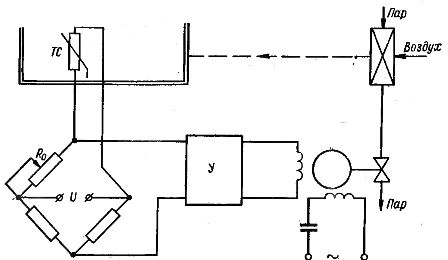
Рис. 6. Схема интегрального регулирования температуры воздуха
В интегральном регуляторе скорость регулирующего органа прямо пропорциональна величине отклонения регулируемого параметра.
Процесс интегрального регулирования температуры при скачкообразном изменении нагрузки (расхода тепла) отображен на рис. 7 с помощью временных характеристик. Как видно из графика, регулируемый параметр при интегральном регулировании медленно возвращается к заданному значению.

Рис. 7. Временные характеристики интегрального регулирования
Изодромные (пропорционально-интегральные) регуляторы
Изодромное регулирование обладает свойствами как пропорционального, так и интегрального регулирования. Скорость перемещения регулирующего органа зависит от величины и скорости отклонения регулируемого параметра.
При отклонении регулируемого параметра от заданного значения регулирование осуществляется следующим образом. Вначале регулирующий орган перемещается в зависимости от величины отклонения регулируемого параметра, то есть имеет место пропорциональное регулирование. Затем регулирующий орган совершает дополнительное перемещение, которое необходимо для устранения остаточной неравномерности (интегральное регулирование).
Изодромную систему регулирования температуры воздуха (рис. 8) можно получить заменой жесткой обратной связи в схеме пропорционального регулирования (см. рис. 5) упругой обратной связью (от регулирующего органа к движку сопротивления обратной связи). Электрическая обратная связь в изодромной системе осуществляется потенциометром и вводится в систему регулирования через контур, содержащий сопротивление R и емкость С.
В течение переходных процессов сигнал обратной связи вместе с сигналом отклонения параметра воздействует на последующие элементы системы (усилитель, электродвигатель). При неподвижном регулирующем органе, в каком бы положении он ни находился, по мере заряда конденсатора С сигнал обратной связи затухает (в установившемся режиме он равен нулю).
Рис. 8. Схема изодромного регулирования температуры воздуха
Для изодромного регулирования характерно, что неравномерность регулирования (относительная ошибка) с увеличением времени уменьшается, приближаясь к нулю. При этом обратная связь не будет вызывать остаточных отклонений регулируемой величины.
Таким образом, изодромное регулирование приводит к значительно лучшим результатам, чем пропорциональное или интегральное (не говоря уже о позиционном регулировании). Пропорциональное регулирование в связи с наличием жесткой обратной связи происходит практически мгновенно, изодромное - замедленно.
Программные системы автоматического регулирования температуры
Для осуществления программного регулирования необходимо непрерывно воздействовать на настройку (уставку) регулятора так, чтобы регулируемая величина изменялась по заранее заданному закону. С этой целью узел настройки регулятора снабжается программным элементом. Это устройство служащее для установления закона изменения задаваемой величины.
При электронагреве исполнительный механизм САР может воздействовать на включение или отключение секций электронагревательных элементов, изменяя тем самым температуру нагреваемой установки в соответствии с заданной программой. Программное регулирование температуры и влажности воздуха широко применяется в установках искусственного климата.
 Протоиерей константин буфеевпротив новой практики причастия – телом христовым и вином
Протоиерей константин буфеевпротив новой практики причастия – телом христовым и вином Лилит в одном знаке у женщин
Лилит в одном знаке у женщин Нло в сирии НЛО над Сирией
Нло в сирии НЛО над Сирией